Motori passo-passo
Accuratamente sincronizzato con gli impulsi per un controllo di posizione ad alta precisione. Elevata coppia e basse vibrazioni, ideale per posizionamenti rapidi su brevi distanze.
Motori passo-passo
Panoramica e Informazioni Correlate
Panoramica
I motori passo-passo consentono un’operazione di posizionamento precisa e semplice.
Questi motori sono utilizzati in vari tipi di apparecchiature per un accurato controllo dell’angolo di rotazione e della velocità di rotazione utilizzando segnali a impulsi.
Posizionamento fine e preciso
Un motore passo-passo è un motore che ruota con un angolo fisso, proprio come la lancetta dei secondi di un orologio. Questo angolo è chiamato “angolo di passo base”. Oriental Motor offre motori passo-passo a 5 fasi con un angolo di passo base di 0,72˚ e motori passo-passo a 2 fasi con un angolo di passo base di 1,8˚.

Facile controllo con segnali a impulsi
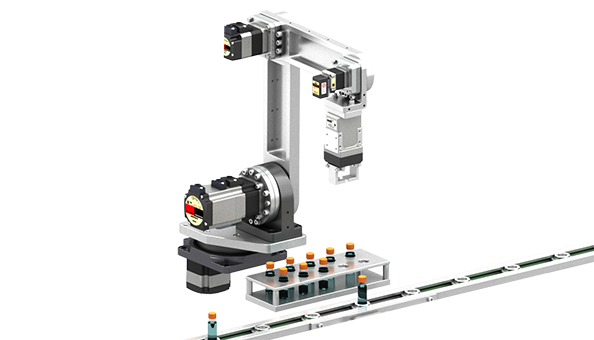
Nella figura seguente è mostrata una configurazione di sistema per il posizionamento ad alta precisione. L’angolo di rotazione e la velocità di rotazione del motore passo-passo possono essere controllati con precisione utilizzando segnali a impulsi dal controller.
Configurazione del sistema

Che cosa è un segnale a impulsi?
Un segnale a impulsi è un segnale elettrico in cui l’alimentazione viene ripetutamente accesa e spenta.
1 ciclo di ON/OFF viene conteggiato come 1 impulso e quando viene inserito 1 impulso, l’albero di uscita del motore ruota di 1 angolo di passo.

L’angolo di rotazione è proporzionale al numero di impulsi
L’angolo di rotazione del motore passo-passo è proporzionale al numero di segnali a impulsi (numero di impulsi) in ingresso al driver.
La relazione tra l’angolo di rotazione del motore passo-passo e il numero di impulsi è espressa come segue:
θ = θS × A
- θ
- Angolo di rotazione dell’albero di uscita del motore [˚]
- θS
- Angolo di passo (risoluzione) [°/passo]*
- A
- numero di impulsi

La velocità di rotazione è proporzionale alla velocità dell’impulso
La velocità di rotazione del motore passo-passo è proporzionale alla velocità di ingresso dei segnali a impulsi (frequenza di impulsi) al driver.
La relazione tra la velocità dell’impulso [Hz] e la velocità di rotazione [giri/min] è espressa come segue:
N = θS / 360 × f × 60
- N
- Velocità di rotazione dell’albero di uscita del motore [giri/min]
- θS
- Angolo di passo (risoluzione) [°/passo]*
- f
- Velocità dell’impulso [Hz]
(Numero di impulsi in ingresso a treno d'impulsi al secondo)
- *Per i motoriduttori, questo è l’angolo di passo (risoluzione) dell’albero di uscita del riduttore.

Compatto e a coppia elevata
I motori passo-passo generano coppia elevata con un corpo compatto.
Queste caratteristiche garantiscono eccellenti prestazioni di accelerazione e reattività, rendendo questi motori particolarmente adatti ad applicazioni in cui il motore deve essere avviato e fermato frequentemente.
Inoltre, utilizzando un motoriduttore, è possibile ottenere una coppia ancora maggiore.
L’avvio e l’arresto frequenti sono possibili

Velocità - caratteristiche di coppia (quando le dimensioni della flangia del motore sono 60 mm)

Il motore si mantiene in una posizione di arresto
I motori passo-passo hanno una forza di tenuta anche quando sono fermi, quindi non devono fare affidamento sui freni meccanici per mantenere la posizione di arresto.

In grado di azionare un’inerzia del carico elevata
I motori passo-passo possono azionare inerzie di carico maggiore rispetto ai servomotori di dimensioni della flangia equivalenti.
Confronto con 30 volte l’inerzia del rotore
-
Motori passo-passo
Inerzia 22,4 x 10-4 kg·m2
(30 volte l’inerzia del rotore)- Inerzia del carico
- Diametro 169 mm, spessore 10 mm, materiale in alluminio
- Motore
- Dimensioni della flangia 60 mm
Lunghezza 90 mm
-
Servomotore convenzionale
Inerzia 4,0 x 10-4 kg·m2
(30 volte l’inerzia del rotore)- Inerzia del carico
- Diametro 110 mm, spessore 10 mm, materiale in alluminio
- Motore
- Dimensioni della flangia 60 mm
Lunghezza 96,5 mm
Applicazioni
Azionamento assi X-Y

Alimentazione del dosatore quantitativo

Funzionamento verticale dello stoccaggio

Applicazione a dosaggio fisso

Tipi di motore
I motori passo-passo sono disponibili in diverse versioni, tra cui la versione standard, la versione con freno elettromagnetico e varie versioni con riduttore. È possibile scegliere un modello adatto alla funzione e alle prestazioni richieste dall’applicazione. Di seguito sono riportati esempi tipici.
Versione standard
Si tratta di un modello base di facile utilizzo.
I motori sono disponibili in diverse dimensioni.

Versione a coppia elevata
Una coppia elevata e una risposta elevata si ottengono inserendo un magnete permanente tra i denti piccoli del rotore e dello statore. Rispetto alla versione standard della stessa dimensione, la coppia è significativamente aumentata.

Versione ad alta risoluzione
La risoluzione di base di questo motore è doppia rispetto alla versione standard.
Ciò si traduce in un’elevata precisione di posizionamento e in una riduzione delle vibrazioni.

Versione encoder
È possibile monitorare la posizione corrente e rilevare errori di posizione.
Ad esempio, confrontando la posizione di comando e la posizione attuale è possibile verificare il normale funzionamento del motore.

Versione con freno elettromagnetico
Questo prodotto incorpora un freno elettromagnetico attivato in caso di interruzione dell’alimentazione.
Quando si verifica un blackout o un altro evento imprevisto, il freno elettromagnetico mantiene il carico in posizione per evitare che cada.
- Una volta interrotta l’alimentazione, la forza autobloccante del motore viene persa e il motore non può più essere tenuto in posizione di arresto nelle operazioni verticali o quando viene applicata una forza esterna. Nelle attrezzature di sollevamento e in applicazioni simili, utilizzare la versione con freno elettromagnetico.

Versione con riduttore
Questi motori incorporano un riduttore con controllo di posizione dedicato e gioco ridotto per sfruttare al massimo l’elevata controllabilità dei motori.
Il riduttore garantisce un funzionamento preciso e fluido anche nelle applicazioni in cui viene applicata una coppia di carico elevata.

Vantaggi dei motoriduttori
Oriental Motor offre motoriduttori, ovvero motori passo-passo preassemblati con riduttori, come varianti dei motori passo-passo. L’utilizzo di motoriduttori offre molti vantaggi, come la decelerazione, la coppia elevata e l’alta risoluzione, nonché quelli elencati di seguito.
Il motore può azionare un’inerzia del carico elevata
Quando si utilizza un motoriduttore, l’inerzia del carico che può essere ruotata aumenta in proporzione al quadrato del rapporto di riduzione rispetto a un motore standard comparabile. Ciò significa che l’inerzia del carico maggiore può essere azionata con motoriduttori.
|

|
|
| Tipo di motore | Versione con riduttore (rapporto di riduzione 5) | Versione standard |
|---|---|---|
| Nome del prodotto | AZM66AC-PS5 | AZM66AC |
| Inerzia del carico ammissibile (30 volte l’inerzia del rotore) |
277,5 × 10-4 kg·m2 | 11,1 × 10-4 kg·m2 |
| Diametro inerzia del carico (spessore 20 mm, materiale in alluminio) |
317 mm | 142 mm |
| Gamma di velocità | 0-600 giri/min | 0~6000 giri/min |
Le caratteristiche di smorzamento all’avvio e all’arresto possono essere migliorate
Se l’inerzia del carico è grande o il tempo di accelerazione/decelerazione è breve, un motoriduttore può ridurre lo smorzamento in modo più efficace e quindi garantire un funzionamento più stabile rispetto a un motore standard. I motoriduttori sono ideali per applicazioni in cui è necessario posizionare rapidamente grandi inerzie, come nel caso di tavole indicizzate o azionamenti di bracci.

Può essere miniaturizzato
Rispetto a un motore standard che genera una coppia massima di tenuta equivalente, un motoriduttore ha dimensioni della flangia più piccole, quindi la sua massa e il suo volume possono essere ridotti. I motoriduttori sono efficaci quando l’apparecchiatura deve essere resa compatta e leggera.

Elevata rigidità e resistenza alla torsione
I motoriduttori hanno un’elevata rigidità, quindi sono resistenti alla torsione e sono meno influenzati dalle fluttuazioni della coppia di carico rispetto ai motori standard. Ciò significa che la stabilità e il posizionamento ad alta precisione possono essere garantiti anche se le dimensioni del carico cambiano.
-
Applicazione: Ascensore
È possibile ottenere un arresto ad alta precisione in meccanismi che operano in verticale, come gli ascensori, anche in situazioni in cui varia il numero o il peso dei carichi.
-
Applicazione: Telecamere di sorveglianza
La telecamera può mantenere una posizione stabile anche quando viene scossa da un forte vento.
Il montaggio diretto del carico è possibile (riduttore armonico, versione con riduttore HPG)
Il riduttore armonico (a eccezione delle dimensioni della flangia da 90 mm) e la versione con riduttore HPG possono montare il carico direttamente sulla superficie rotante integrata con l’albero.
Esempio di aspetto e montaggio

Applicazione: Tavola indicizzata
Questo non solo riduce il numero di parti e processi, ma migliora anche l’affidabilità. Sono anche adatti per il funzionamento con carichi di momento.

Tipi e caratteristiche dei motoriduttori
Sono disponibili vari modelli di motoriduttori per motori passo-passo.
È possibile selezionare la versione ottimale in base alla coppia, all’accuratezza (gioco) e altro ancora.
Fare clic sulla figura a destra per fare riferimento alle caratteristiche e alle specifiche principali di ciascun tipo.
- Fare riferimento a questo per capire le differenze tra ogni tipo.
- Il motoriduttore applicabile è diverso per ciascuna Serie.

Fare clic per visualizzare i dettagli
| Versioni di riduttore | Albero parallelo | Angolare | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| SH (Riduttore ad ingranaggio cilindrico) |
CS (Riduttore ad ingranaggio cilindrico) |
TH (Riduttore ad ingranaggio cilindrico) |
TS (Riduttore ad ingranaggio cilindrico) |
PS (Riduttore a ingranaggi planetari) |
PN (Riduttore a ingranaggi planetari) |
HPG (Harmonic Planetary® |
Armonico (Harmonic drive ® |
FC (Riduttore con ingranaggio a corona dentata) |
|||
| Vista esterna |

|

|

|

|

|

|

|

|

|

|
|
| Caratteristiche | |||||||||||
| Accuratezza | Per 2 fasi | Gioco ridotto | Senza gioco | Gioco ridotto | |||||||
| ★ | ★ | ★★ | ★★ | ★★ | ★★★ | ★★★ | ★★★ | ★★ | |||
| Coppia elevata | ★ | ★★ | ★ | ★★ | ★★ | ★★ | ★★ | ★★ | ★★ | ||
| Coppia massima istantanea disponibile | - | - | - | ○ | ○ | ○ | ○ | ○ | - | ||
| Montaggio frontale del carico | - | - | - | - | - | - | - | ○ | ○ | - | |
| Albero centrale | - | ○ | - | - | ○ | ○ | ○ | - | ○ | ○ | |
| Specifiche principali | |||||||||||
| Tipi di rapporti di riduzione | 3,6, 7,2, 9, 10, 18, 36 | 5, 10, 15, 20 | 3,6, 7,2, 10, 20, 30 | 3,6, 7,2, 10, 20, 30 | 5, 7,2, 10, 25, 36, 50 | 5, 7,2, 10, 25, 36, 50 | 5, 15 | 50, 100 | 7,2, 10, 20, 30 | ||
| Range di velocità [giri/min] | ~833 | ~600 | ~500 | ~833 | ~600 | ~600 | ~900 | ~70 | ~416 | ||
| Coppia ammissibile [N·m] | ~4 | ~4,5 | ~4 | ~6 | ~8 | ~8 | ~9 | ~10 | ~10,5 | ||
| Coppia massima istantanea [N·m] | - | - | - | ~10 | ~20 | ~20 | ~19 | ~36 | - | ||
| Gioco [arcmin] | 45~70 | 45~70 | 10~35 | 10~35 | 7~9 | 2~3 | 3 | 0 | 10~15 | ||
| Versioni di riduttore | SH | CS | TH | TS | PS | PN | HPG | Armonico | FC | ||
- *Fare riferimento ai valori di cui sopra per comprendere le differenze tra ciascun tipo. Varia a seconda delle dimensioni della flangia e del rapporto di riduzione.
- *I valori nelle specifiche principali si basano su una dimensione della flangia di 60 mm.
- *Harmonic Planetary®, Harmonic Drive® e HD" sono marchi registrati o marchi commerciali di Harmonic Drive Systems Inc.

-
Fare riferimento alla documentazione tecnica per ulteriori informazioni sul principio e la struttura di ciascun tipo.
Riduttori per motori passo-passo e servomotori
Tipi di driver
Modello con posizionatore integrato
Con questo tipo, i dati di funzionamento vengono impostati nel driver, quindi selezionati ed eseguiti dal sistema host. La connessione e il controllo del sistema host sono eseguiti in uno dei seguenti modi: I/O, comunicazione RS-485/Modbus (RTU) o rete industriale. Utilizzando un convertitore di rete (venduto separatamente), la comunicazione EtherCAT è possibile.
- FLEX è il nome collettivo per i prodotti che supportano il controllo I/O, il controllo Modbus (RTU) e il controllo di rete industriale tramite convertitori di rete.


Versione treno di impulsi con comunicazione RS-485 (solo Serie AZ)
Il funzionamento viene eseguito in base al segnale a impulsi immesso nel driver. Il motore è controllato da un modulo di posizionamento (generatore di impulsi) fornito dal cliente. La comunicazione RS-485 può essere utilizzata per monitorare le informazioni sullo stato del motore (posizione, velocità, coppia, allarmi, temperatura, ecc.).


Versione treno di impulsi
Il funzionamento viene eseguito in base al segnale a impulsi immesso nel driver. Il controllo del motore viene eseguito da un modulo di posizionamento (generatore di impulsi) fornito dal cliente. Il software di supporto (MEXE02) può essere utilizzato per controllare la cronologia degli allarmi e monitorare le informazioni sullo stato.


Driver compatibile con la rete (solo Serie AZ)
Questo driver supporta le comunicazioni EtherNet/IP ed EtherCAT. Può essere controllato direttamente dalla rete. Un singolo cavo di comunicazione viene utilizzato per collegare il driver al controllore host, risparmiando così il cablaggio.

Driver multiasse (Serie AZ, solo alimentazione DC)
Si tratta di un driver multiasse compatibile con SSCNETIII/H, MECHATROLINK-III ed EtherCAT.
Questo driver può essere collegato ai motori con alimentazione DC Serie AZ e agli attuatori elettrici dotati di tali motori.
Sono disponibili driver con connettività a 2 assi, 3 assi e 4 assi.

- *EtherCAT® è un marchio registrato e una tecnologia brevettata, concessa in licenza da Beckhoff Automation GmbH, Germania.
- *EtherNet/IP™ è un marchio commerciale di ODVA.
- *Modbus (RTU) è un marchio registrato di Schneider Automation Inc.
- *Il software di supporto MEXE02 può essere scaricato qui.
Informazioni correlate
Per chi non ha ancora scelto una Serie
Guida alla selezione
Questa Guida alla selezione vi aiuterà a trovare la Serie di prodotti più adatta alla vostra apparecchiatura. Selezionate un esempio di un’apparecchiatura e seguite le istruzioni per scegliere una Serie di prodotti.
Maggiori informazioni
Casi di studio per la risoluzione dei problemi
Ecco le informazioni sulle soluzioni ai problemi della vostra apparecchiatura. Vi illustriamo degli esempi di produzione interna di apparecchiature utilizzate in siti di produzione reali nonché esempi di applicazione dei nostri prodotti consigliati per risolvere i problemi delle apparecchiature tradizionali.
Maggiori informazioni