Mobile Robot Controller
MVC01
- Equipped With a Driving Control Function for AGV/AMR Transport Robots
- Support From Start-Up to Maintenance With Dedicated PC Software
- Output Gyro Odometry With Built-In IMU
- Can be Combined With BLV-R Series
Caratteristiche |Robot controller mobile MVC01
- Robot controller mobile - Garantisce un movimento preciso dei robot di trasporto
- Riduce l’onere dello sviluppo del software condividendo il ruolo con i controllori host
- Rilevamento dello slittamento tramite acquisizione accurata delle informazioni di posizione tramite IMU
- Dimensioni compatte per una facile integrazione nel design
- Software di supporto gratuito MVC Studio
- Supporto per la programmazione
- Prodotti per combinazione
Robot controller mobile - Garantisce un movimento preciso dei robot di trasporto
- Il robot controller mobile controlla i motori del robot di trasporto sulla base dei comandi provenienti dai controllori host.
- Determinando autonomamente le coordinate di guida, consente un movimento più preciso.
- Rispetto al controllo diretto da parte dei controllori host, può ridurre il numero di nodi ROS e di programmi sviluppati internamente, contribuendo a ridurre il carico della progettazione del software.
- Il robot controller mobile può essere combinato con il motore brushless della Serie BLV-R.

Riduce l’onere dello sviluppo del software condividendo il ruolo con i controllori host
I robot controller mobili sono dotati delle funzioni di controllo della guida necessarie per la guida AGV/AMR. Il robot controller mobile esegue i calcoli per ciascuna ruota e il controllo sincrono tra gli assi, riducendo così il carico di sviluppo software e i tempi di avviamento.
Funzioni di controllo della guida modularizzate per robot di trasporto (AGV/AMR)
| Controllato solo dai controllori host | Controllato dai “controllori host + robot controller mobile" |
|---|---|
| I controllori host sono responsabili sia dell’applicazione di livello superiore che dell’applicazione di controllo della guida | [Condivisione di ruoli] ・Applicazione di controllo della guida → affidata al controller robot mobile ・Applicazione di livello superiore → affidata al controllore host |
| Elevato carico di progettazione del software | Basso carico di progettazione del software |
Confronto dei componenti (per AMR)

Confronto delle applicazioni

Maggiore personalizzabilità di ruote, sistemi di trazione, ecc. Attraverso la modularizzazione delle funzioni di controllo della guida
Se tutto il software è sviluppato in ROS, ogni personalizzazione della meccanica — ad esempio la sostituzione delle ruote — richiede modifiche al programma ROS, aumentando così il carico di aggiornamento. Utilizzando MVC01 per la parte di controllo della guida, anche quando le ruote vengono cambiate, le impostazioni sul lato host rimangono le stesse e possono essere facilmente riconfigurate in MVC Studio.

Personalizza il robot

Per modificare la configurazione della ruota, le dimensioni del robot, ecc., è sufficiente riconfigurare MVC01
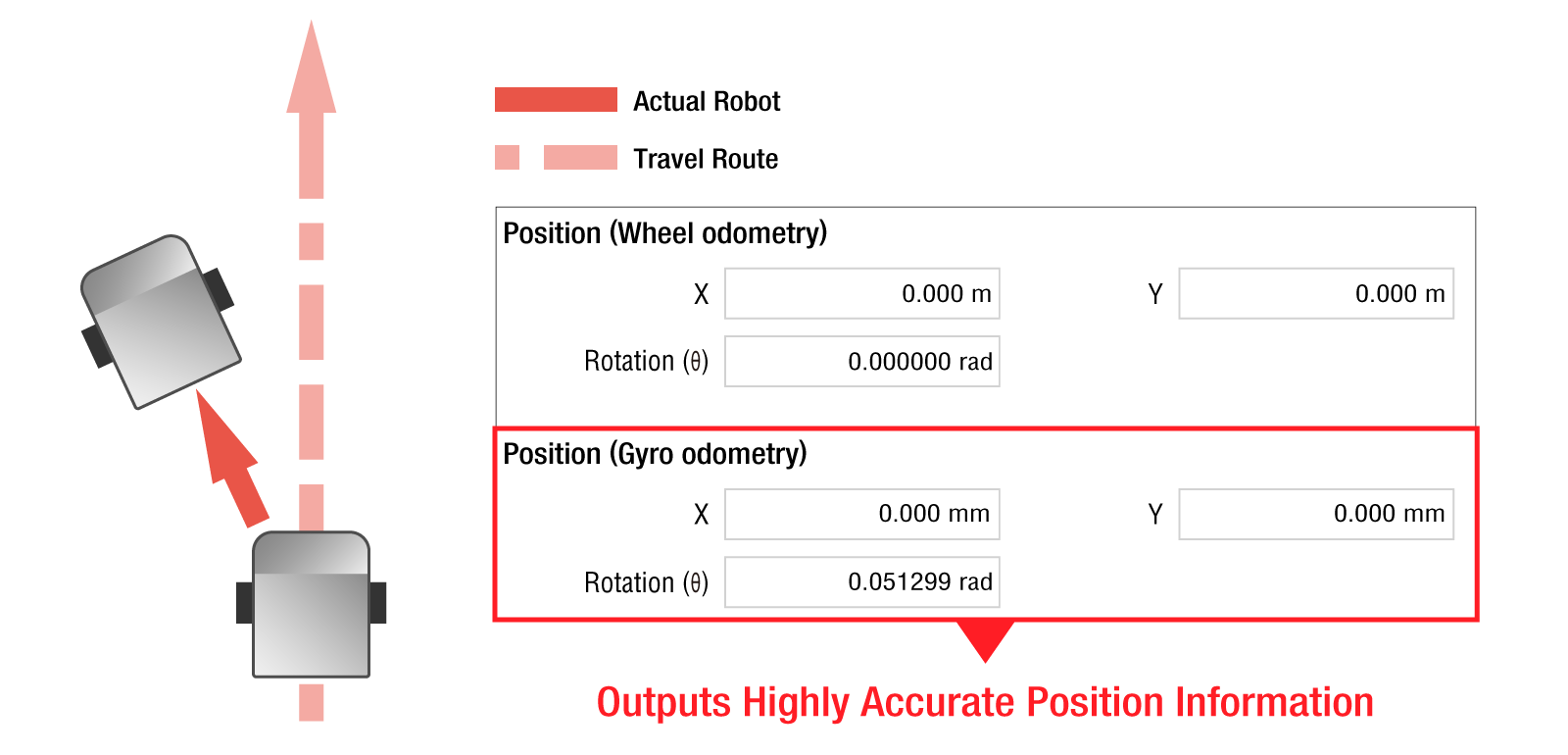
Rilevamento dello slittamento tramite acquisizione accurata delle informazioni di posizione tramite IMU
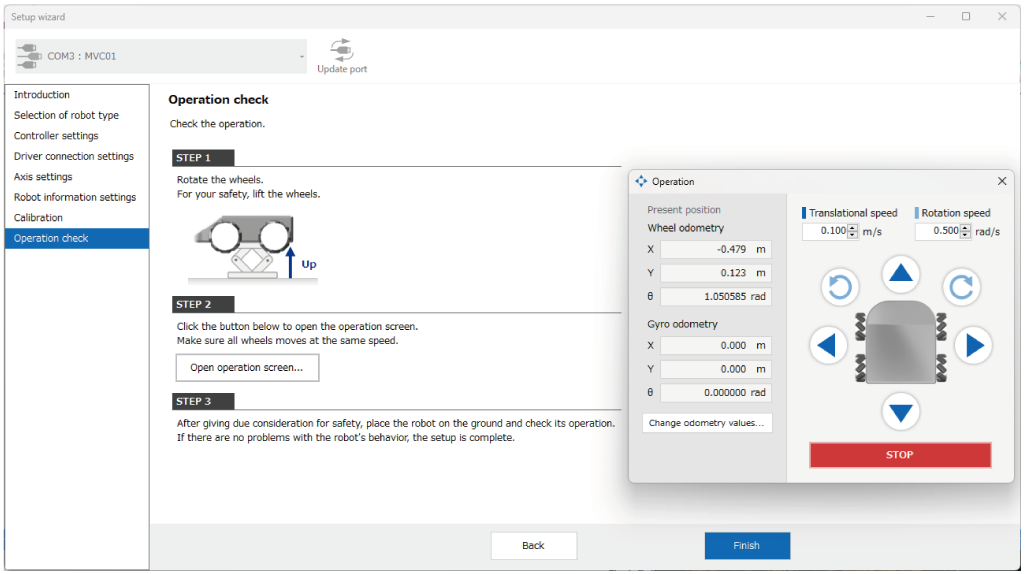
Grazie all'IMU integrata, il robot controller mobile può fornire informazioni sulla posizione calcolate tramite odometria giroscopica.
L’odometria giroscopica è un metodo per stimare le informazioni di posizione dai dati dell’encoder dell’IMU e del motore.
Durante il movimento su terreni irregolari, lo slittamento può facilmente causare errori nel robot reale e nelle informazioni di posizione, ma l’IMU può fornire informazioni di posizione più accurate.
Unità di misura inerziale (IMU)
Un sensore che combina un sensore di accelerazione e un sensore giroscopico.
Rileva il movimento inerziale tridimensionale (traslazione e rotazione lungo le tre direzioni dell’asse cartesiano).

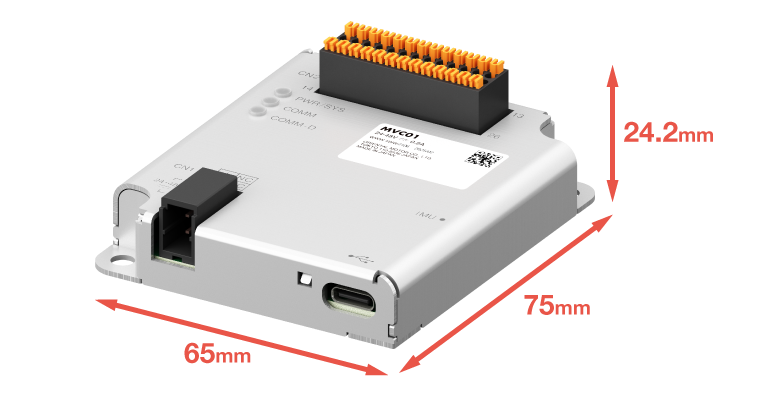
Dimensioni compatte per una facile integrazione nel design
Dimensioni compatte che si adattano a piccoli spazi. È equivalente per dimensioni al driver della Serie BLV-R.
Robot controller mobile
Massa: 60 g
Driver Serie BLV-R
Massa: 120 g

Software di supporto gratuito MVC Studio
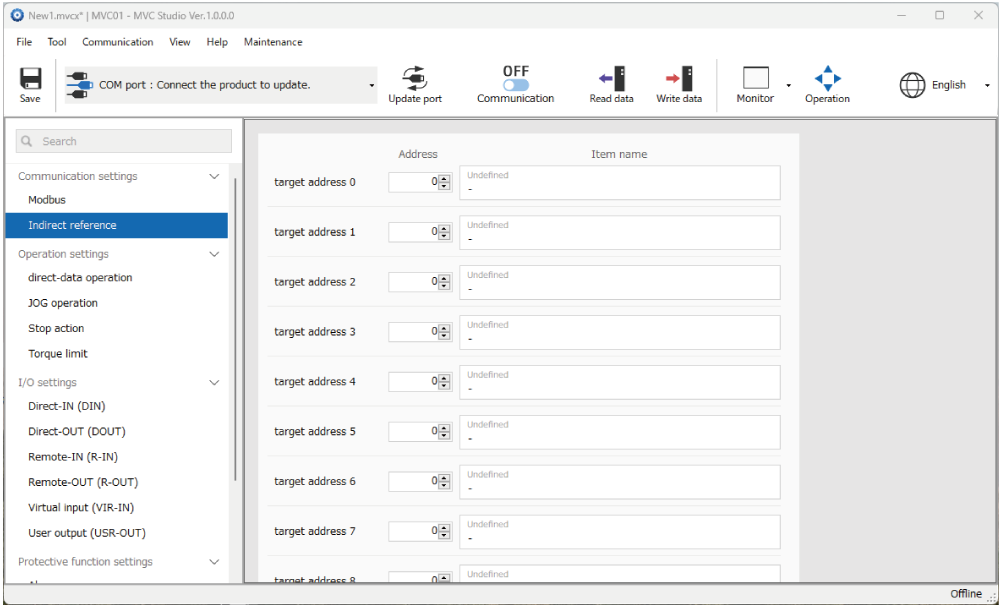
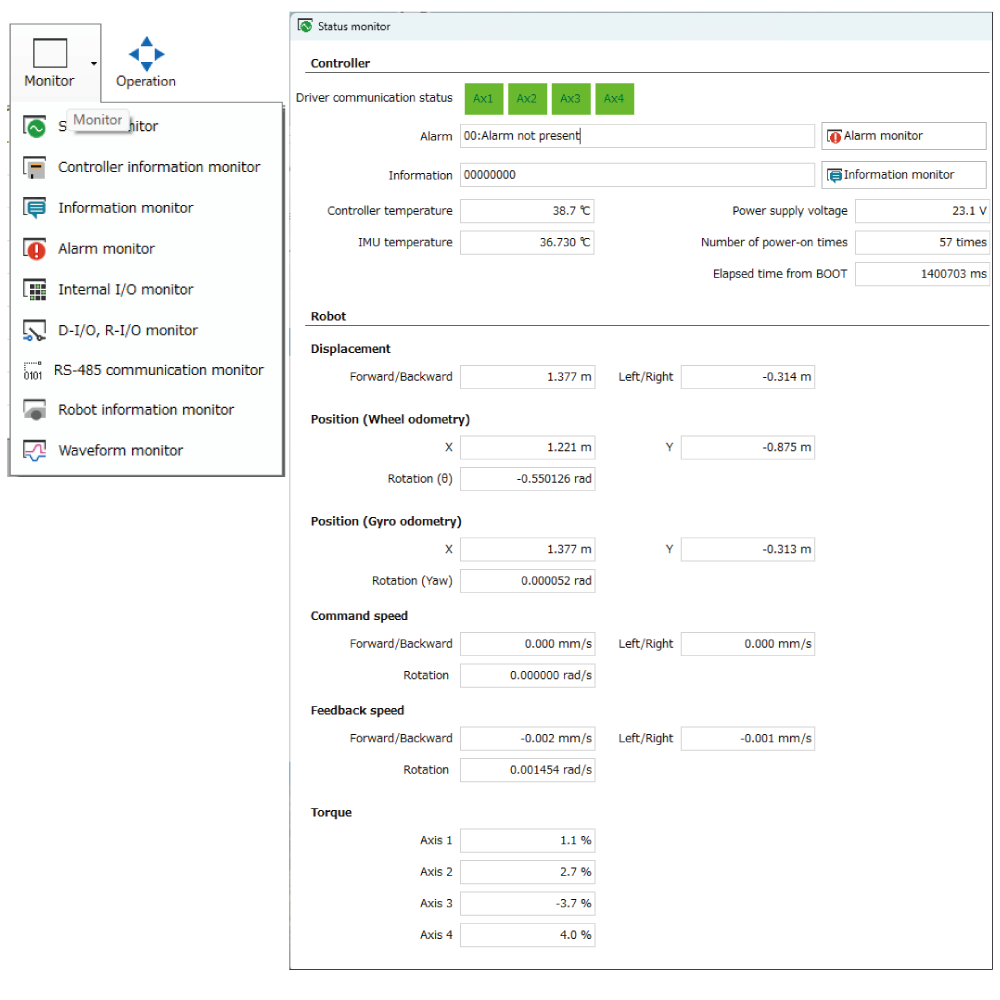
È disponibile un software che supporta il robot controller mobile dalla fase di avvio fino alla manutenzione. Oltre a consentire l’impostazione e la modifica di vari parametri, è possibile monitorare diversi stati. Il software è disponibile per il download gratuito.

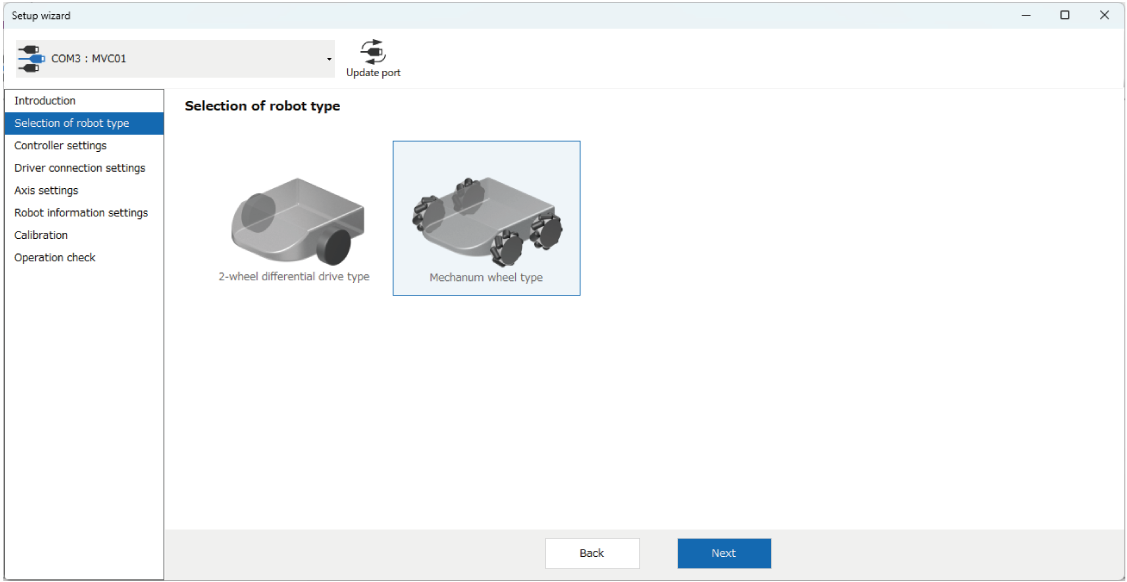
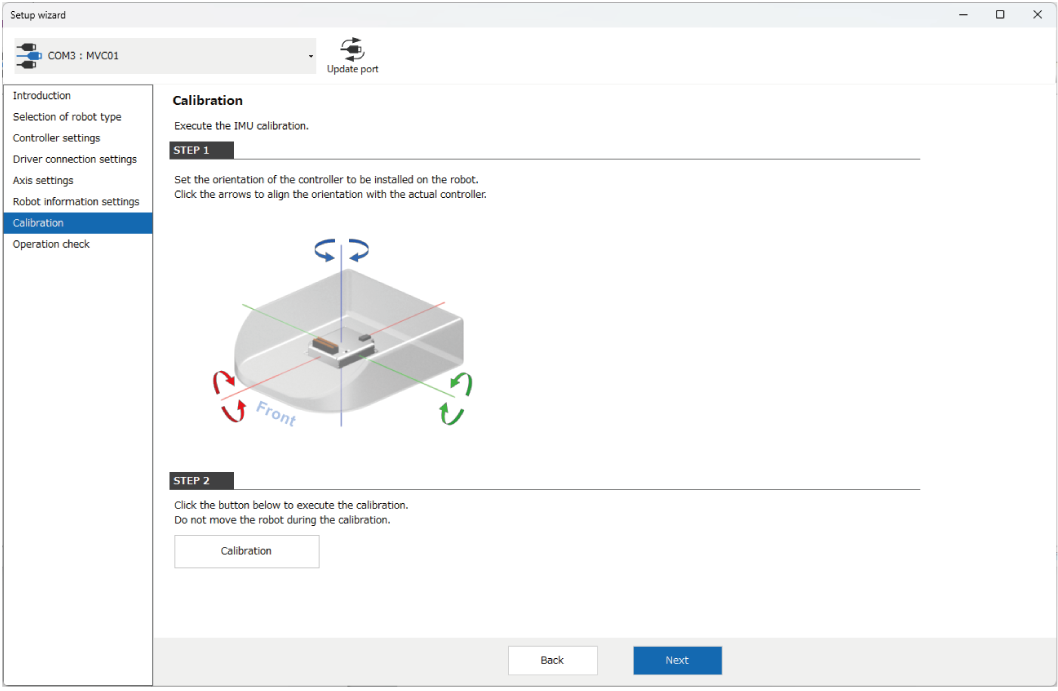
Seguire la Guida per completare le impostazioni iniziali in modo semplice e senza errori.
Una serie di impostazioni iniziali, come la selezione del sistema di movimentazione (2 ruote motrici, 4 ruote motrici, ecc.) e l’inserimento delle informazioni sulla meccanica, possono essere eseguite tramite una procedura guidata. Seguendo le indicazioni e le istruzioni illustrate, anche gli utenti principianti possono completare le impostazioni in breve tempo.
Seguire i passaggi per la configurazione
Seguire il menu della procedura guidata per procedere con l’impostazione iniziale del robot.
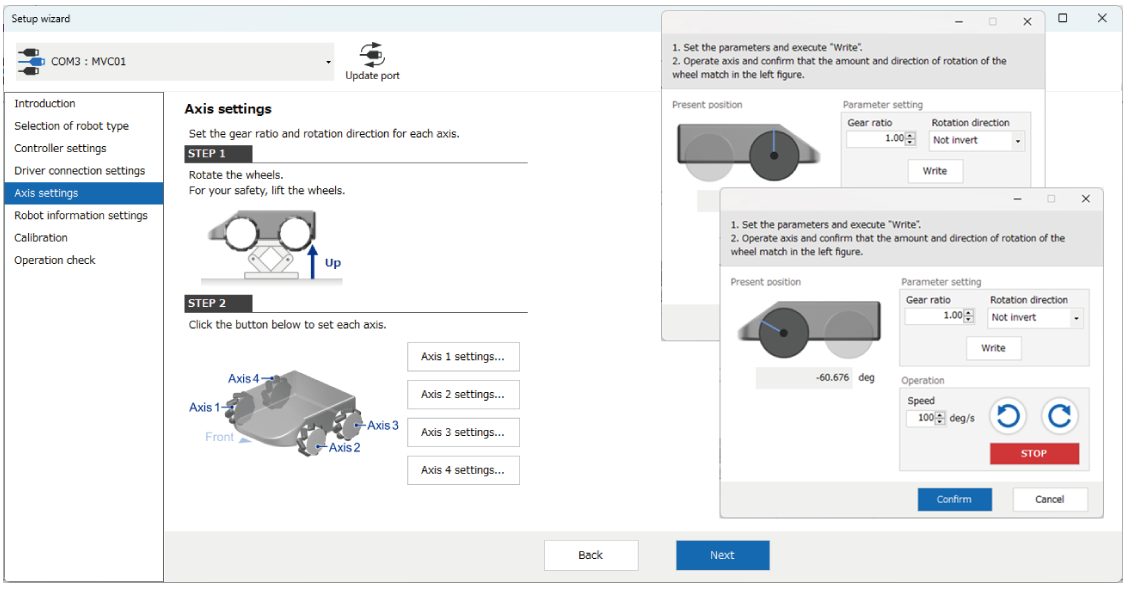
[2] Impostazione asse
Impostare il rapporto di riduzione e il senso di rotazione per ciascun asse
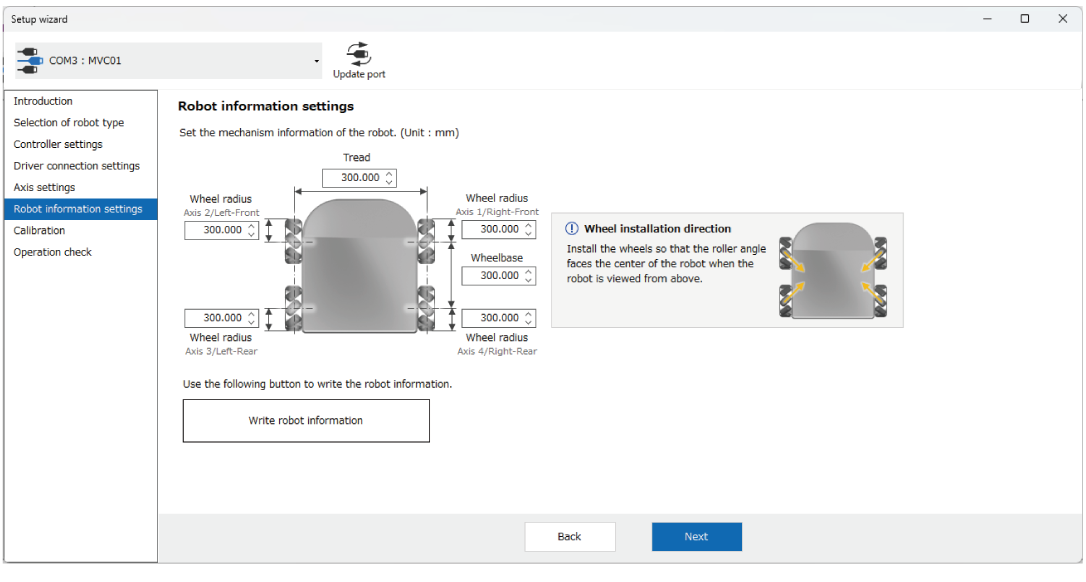
[3] Impostazioni informazioni robot
Impostazione delle informazioni sulla meccanica del robot
Funzione di impostazione e monitoraggio dei parametri per l’avvio e la manutenzione
Impostazione parametro
I dati configurati possono essere salvati su PC, permettendo di riutilizzare le stesse impostazioni anche in caso di sostituzione del controller.
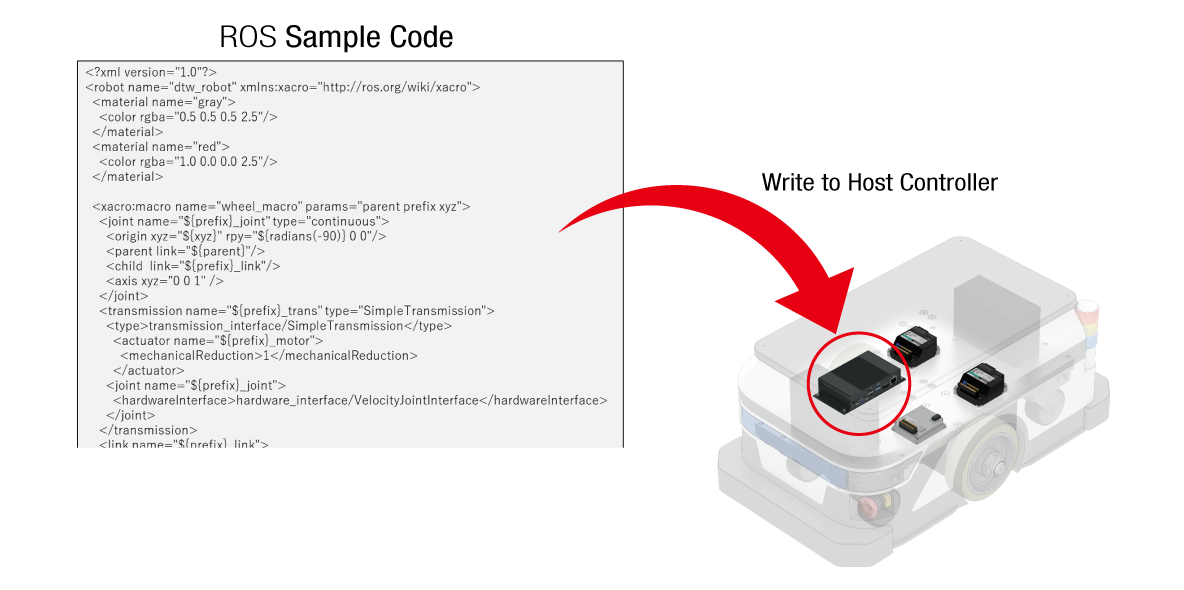
Supporto per la programmazione
Sono disponibili nodi ROS, manuali e codice di esempio per ROS2. Se si è alle prime armi con il controllo tramite ROS e si vuole ridurre il tempo necessario per la progettazione del programma, Oriental Motor può anche fornire programmi di esempio, inclusi quelli per l’integrazione con il robot controller mobile.
Copertura del supporto al programma
- Consulenza tecnica generale su MVC01
- Supporto per la configurazione dell’ambiente, incluso il sistema operativo, quando si desidera controllare tramite Raspberry Pi, ecc. (incluso l’ambiente ROS)
- Creazione di codice di esempio per controllare MVC01 utilizzando un gamepad
- *Oriental Motor non fornisce supporto per la guida autonoma utilizzando sensori esterni (line follower o LiDAR).
Prodotti per combinazione
Il motore può essere combinato con il motore brushless della Serie BLV-R.
Per la Serie BLV-R sono disponibili anche motori per ruote motrici che possono essere montati direttamente sulle ruote.
Motore brushless

Serie BLV-R
(Motore per ruote motrici)
Filtra per prodotti
Scaricare
Catalogo

Serie MVC01
Robot controller per AGV/AMR
