Small Robots OVR
3-Axis SCARA Robot

- Lightweight and flat, with a mass starting from 7.6 kg and a height starting from 137 mm
- Able to approach narrow spaces
- The 3rd arm can be freely designed to fit the equipment
- Maximum reach 410 mm/460 mm/700 mm, payload 3–10 kg
- Drive Motor: AZ Series with battery-free built-in absolute encoder (DC input)
Caratteristiche |Robot SCARA a 3 assi
- Robot SCARA piatto
- Linea di prodotti che possono essere selezionati in base all’applicazione
- Design personalizzabile per adattarlo alla propria attrezzatura
- L’auto-manutenzione è possibile
- Robot controller facile da gestire
- Utilizzo della serie AZ con encoder assoluto integrato senza batteria
- Strumenti utili prima di installare i robot
- Informazioni dettagliate sul prodotto
- Facile implementazione dei robot nei sistemi esistenti
- Staffa di montaggio per robot SCARA a 3 assi
- Prodotti correlati
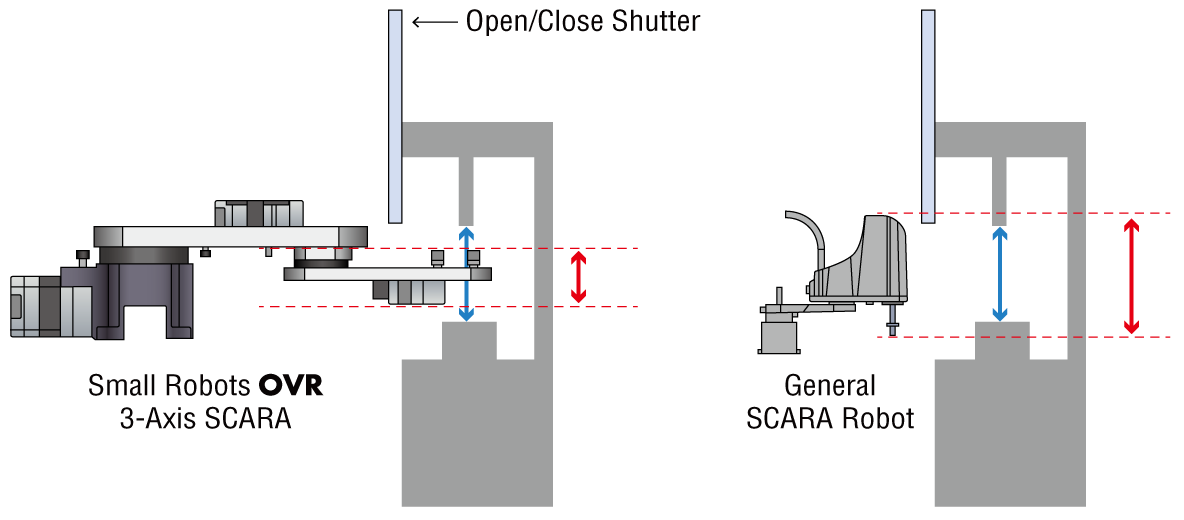
Robot SCARA piatto
Rispetto ai robot SCARA generici, il design piatto consente al robot di gestire spazi ristretti, come ad esempio per fissare e staccare parti da e verso le apparecchiature.
Ecco la presentazione delle operazioni di trasferimento del carico in combinazione con le colonne di sollevamento elettriche della Serie EL.
- Il raggio d’azione verticale può essere facilmente ampliato sollevando e abbassando il corpo del robot.
- L’altezza della punta del robot può essere ridotta, consentendo al robot di avvicinarsi a spazi ristretti.
- Non è necessario progettare una guida esterna o sistemare i pezzi, riducendo i tempi di avviamento dell’apparecchiatura.
Linea di prodotti che possono essere selezionati in base all’applicazione
Oltre ai robot SCARA convenzionali, sono disponibili anche robot SCARA in grado di muoversi in modo omnidirezionale.
Le specifiche migliorate, come l’elevata massa trasportabile e la corsa lunga, hanno ampliato la gamma di applicazioni.
Caratteristiche e versioni
| Nome del prodotto | OVR3041K3-H | NUOVOOVR3046K10-H | NUOVOOVR3070K3-H | |
|---|---|---|---|---|
| Vista esterna |
|

|

|
|
| Caratteristiche | ・Piatto e leggero ・Basso costo |
・Elevata massa trasportabile ・Il movimento omnidirezionale accorcia i tempi di lavorazione ・Struttura semplice e resistente alla polvere |
・Corsa lunga ・Il movimento omnidirezionale accorcia i tempi di lavorazione ・Struttura semplice e resistente alla polvere |
|
| Portata massima | 410 mm | 460 mm | 700 mm | |
| Massa trasportabile massima | 3 kg | 10 kg | 3 kg | |
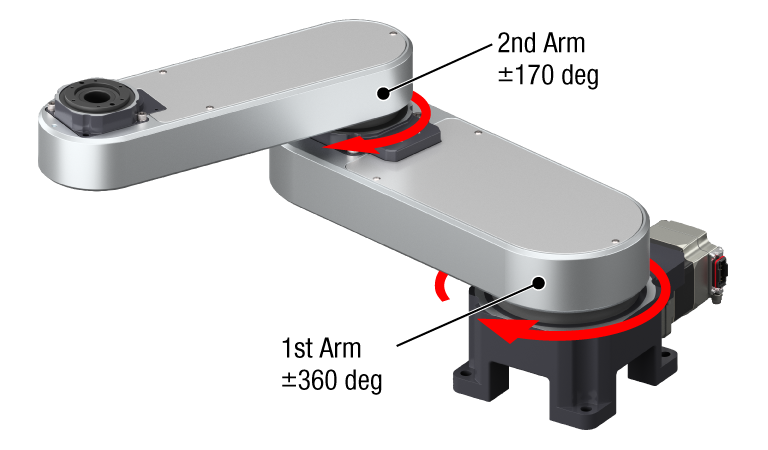
| Raggio di movimento* | 1° asse | ±170 gradi | ±360 gradi | ±360 gradi |
| Secondo asse | ±140 gradi | ±170 gradi | ±170 gradi | |
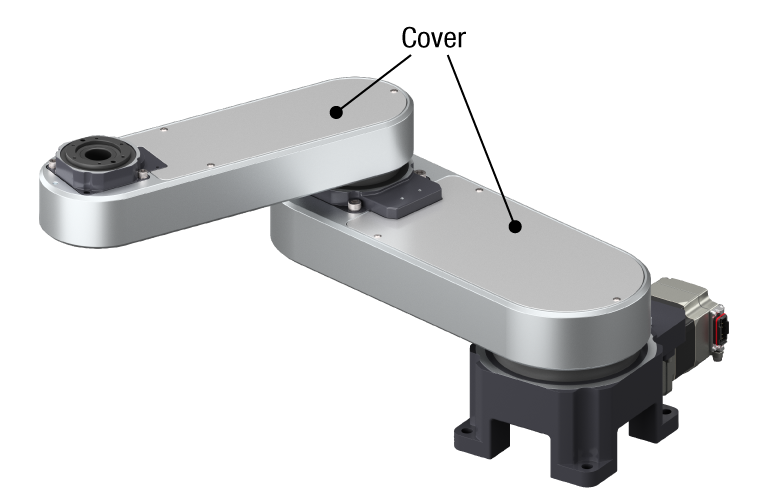
| Copertura | - | Con copertura | Con copertura | |
- *Questa è la gamma di funzionamento per una postura di installazione in origine, con il perno di posizionamento inserito nel foro del perno di origine.
Il movimento omnidirezionale accorcia i tempi di lavorazione
Sono disponibili prodotti in grado di eseguire movimenti omnidirezionali.
Confronto delle operazioni tra il prodotto esistente e quelli della nuova linea
Il movimenti omnidirezionali della nuova linea di prodotti permette al braccio di passare sopra il robot, consentendo una distanza di avvicinamento ottimale.
In questo modo, i tempi di lavorazione possono essere ridotti del 37% rispetto a quelli dei prodotti esistenti.
Raggio d’azione
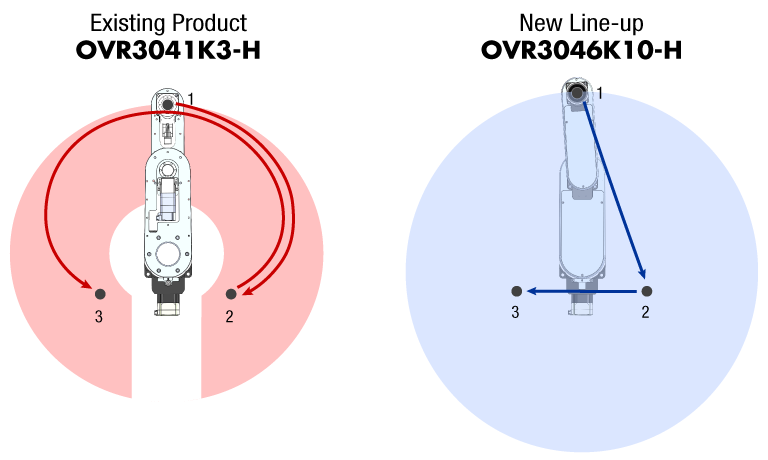
Prodotto esistente OVR3041K3-H
Tempo di lavorazione 8,6 sec.
Nuova linea di prodotti OVR3046K10-H
Tempo di lavorazione 5,4 sec.
Struttura semplice e resistente alla polvere
Sono disponibili prodotti dotati di una semplice copertura contro la polvere. Questa copertura previene l’intrusione di corpi estranei e riduce l’abrasione del cavo.
Design personalizzabile per adattarlo alla propria attrezzatura
Esempio di applicazione
Il design di questo robot può essere liberamente personalizzato in base alle applicazioni.
- Struttura piatta e compatta
- Il terzo braccio può essere progettato liberamente
- Combinando colonne di sollevamento elettriche e attuatori, il movimento si estende in modo fluido e versatile, sia in orizzontale che in verticale.
Esempio 1: Sollevamento del corpo del robot
Riducendo l’altezza della punta, il robot può raggiungere con facilità anche gli spazi più stretti. L’assenza di barriere orizzontali consente un funzionamento omnidirezionale.
Tipo di installazione: Montaggio a pavimento, montaggio a soffitto
Corsa verticale: Corta-media (50~300 mm)

| ➀ | Small Robots OVR a 3 assi SCARA OVR3070K3-H |
|---|---|
| ➁ | Colonne di sollevamento elettriche serie EL EL1210AZMK |
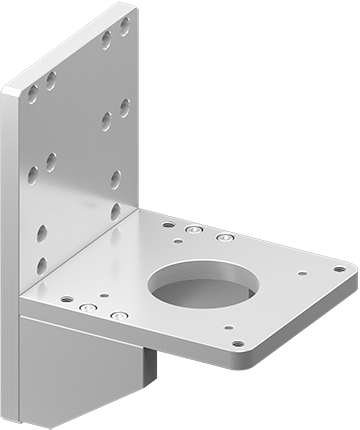
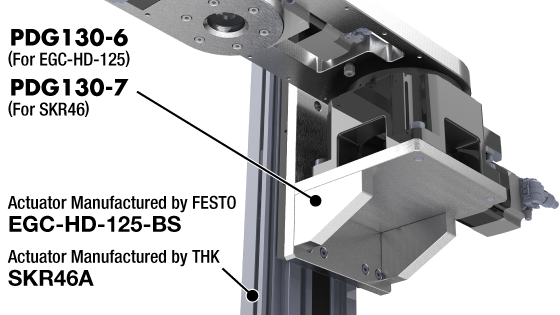
Esempio 2: Funzionamento verticale del corpo del robot
Riducendo l’altezza della punta, il robot può raggiungere con facilità anche gli spazi più stretti. Compatibile con ampio range di operazioni verticali.
Tipo di installazione: Montaggio a parete *Per la versione omnidirezionale, alcune parti non possono essere spostate
Corsa verticale: Corta-lunga

| ➀ | Small Robots OVR a 3 assi SCARA OVR3041K3-H |
|---|---|
| ➁ | Staffa di montaggio PDG130-6 |
| ➂ | Attuatore prodotto da FESTO EGC-HD-125-BS |
Esempio 3: Funzionamento verticale dell’ end effector
Il sistema consente un’operatività verticale compatta, ideale quando lo spazio è limitato.
Tipo di installazione: Montaggio a pavimento
Corsa verticale: Corta (30 mm)

| ➀ | Small Robots OVR a 3 assi SCARA OVR3041K3-H |
|---|---|
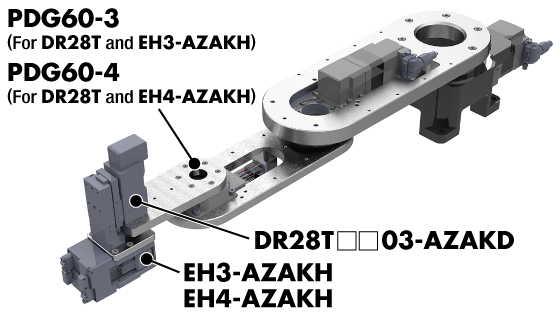
| ➁ | Staffa di montaggio PDG60-4 |
| ➂ | Cilindri elettrici compatti DR28T■■03-AZAKD |
| ➃ | Pinza elettrica Serie EH EH4-AZAKH |
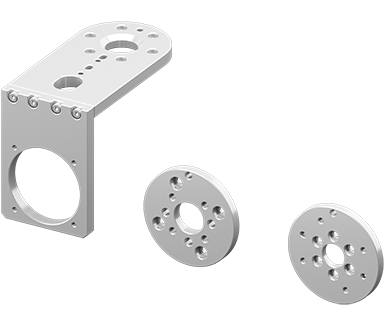
Esempio 4: Azionamento rotante dell’end effector
L’angolo dell’end effector può essere modificato, ad esempio invertendo il pezzo.
Modalità di installazione: Montaggio a pavimento, montaggio a soffitto

| ➀ | Small Robots OVR a 3 assi SCARA OVR3041K3-H |
|---|---|
| ➁ | Motori Serie AZ + Riduttore Harmonic Drive AZM24AK + CSF-8-■-2UP-SP-A |
| ➂ | Staffa di montaggio PDG60-5 |
| ➃ | Adattatore flangia robot P3F2 |
| ➄ | Pinza elettrica Serie EH EH4-AZAKH |
Per facilitare l’installazione rapida del robot sono disponibili utili accessori.
Modalità di installazione selezionabile
Sono disponibili sia il montaggio a pavimento che quello a soffitto.
| Modalità di installazione | Montaggio a pavimento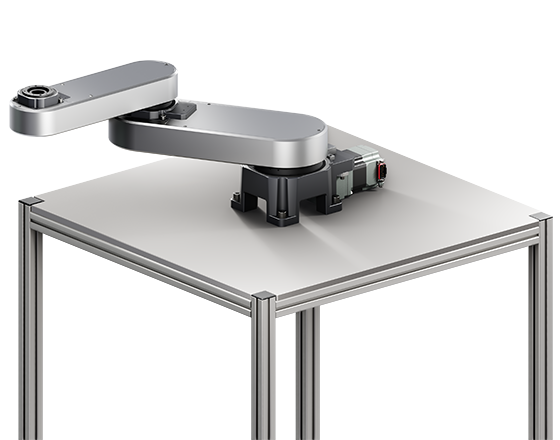
|
Installazione a soffitto
|
|---|---|---|
| Facilità di installazione | Installazione semplice | ・Il robot deve essere invertito ・Richiede una base di montaggio solida |
| Spazio di lavoro | I pallet e gli altri componenti devono essere posizionati tenendo conto dello spazio di installazione del robot. | Spazio utilizzabile direttamente sotto il robot |
Qui vengono introdotte le operazioni di trasferimento del carico quando il robot è montato a soffitto. Lo spazio di lavoro sotto il robot può essere utilizzato in modo efficace montandolo a soffitto.
L’auto-manutenzione è possibile

Gli attuatori elettrici per ciascun asse possono essere sostituiti dal cliente. Riduce il carico di manutenzione (costi e tempi) dopo l’installazione.
- *Oriental Motor, durante la manutenzione e l’assistenza, sostituisce anche i motori. Contattare la filiale o l’ufficio vendite Oriental Motor più vicino.
Robot controller facile da gestire

L’MRC01 è un robot controller in grado di controllare i robot equipaggiati con la serie AZ.
Il software di programmazione MRC Studio (gratuito) è così semplice che anche chi non ha esperienza a controllare i robot sarà in grado di padroneggiarlo rapidamente.

È disponibile anche la serie MRCU, che combina il robot controller Serie MRC01 e driver AZ (fino a 8 assi) in un unico pacchetto.
Riduce gli ostacoli di controllo nell’installazione del robot e contribuisce a ridurre i tempi di avvio.
Fare clic qui per i dettagli sul robot controller integrato Serie MRCU e sui driver
- Nota: quando si utilizza il robot, è bene considerare la sua sicurezza in quanto robot industriale. (Non può essere utilizzato come robot collaborativo)
Utilizzo della serie AZ con encoder assoluto integrato senza batteria
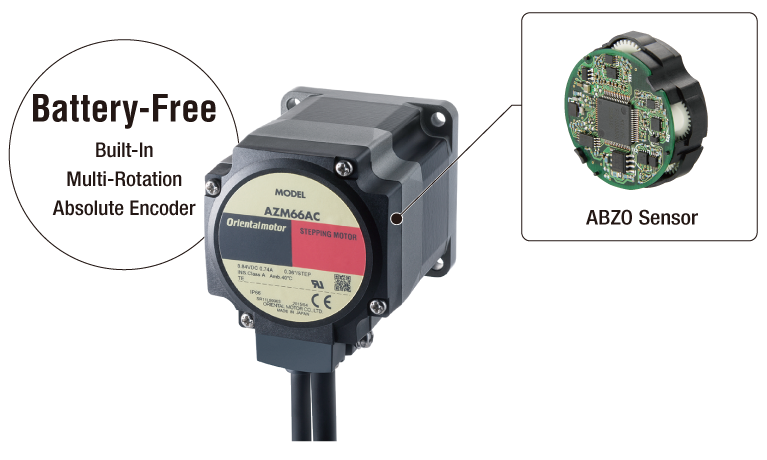
Tutti gli assi utilizzano la serie AZ αSTEP (alimentazione DC).
La modalità Assoluta elimina la necessità di sensori esterni, riduce il cablaggio e la manutenzione eliminando la necessità di gestione della batteria.
L’alimentazione in corrente continua rende il passaggio dei cavi molto più semplice e ordinato Le modifiche all’installazione e al layout della linea possono essere adattate in modo flessibile.
Strumenti utili prima di installare i robot
MRC Studio Simulator

Questo software gratuito consente di simulare i movimenti effettivi su PC in fase di valutazione dell'introduzione di un robot, senza bisogno del robot stesso o dell'MRC01.
Fare clic qui per i dettagliMRC Reality

I robot virtuali possono essere configurati in uno spazio reale per simulare le operazioni.
Sono disponibili app per smartphone/tablet e per visori VR (Meta Quest 3).
Informazioni dettagliate sul prodotto
Per informazioni dettagliate sul prodotto, come specifiche, caratteristiche, dimensioni, CAD, manuali operativi, ecc. fai clic sul link del nome del prodotto qui sotto.
OVR3041K3-H (portata massima 410 mm)
OVR3046K10-H (portata massima 460 mm)
OVR3070K3-H (portata massima 700 mm)
Facile implementazione dei robot nei sistemi esistenti
L’MRC si collega al controllore host utilizzando EtherNet/IP™ per il controllo diretto. Small Robots OVR può essere facilmente aggiunto alle apparecchiature esistenti senza apportare modifiche significative al sistema di controllo. Il software di programmazione MRC Studio (gratuito) può essere utilizzato per la programmazione del robot. Small Robots OVR dispone di informazioni sul meccanismo preinstallato, semplificando l’esecuzione delle impostazioni iniziali.
- *EtherNet/IP™ è un marchio commerciale di ODVA.
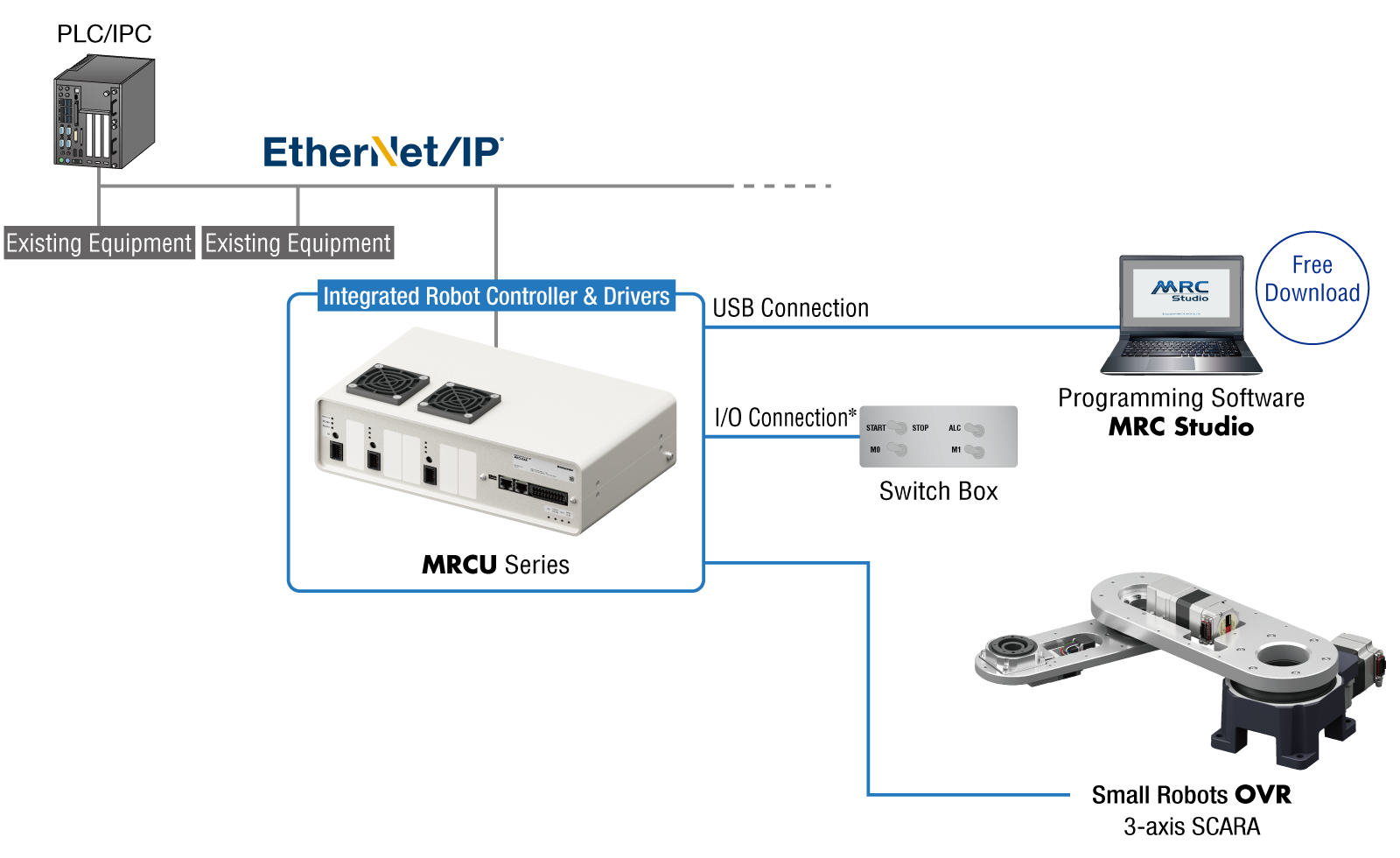
- *La serie MRCU può essere utilizzata anche con una connessione I/O (senza un controllore host).
- ・Inoltre, sono necessari l’alimentatore DC e l’end effector.
- ・I cavi sono venduti separatamente.
- ・CC09MRCU030 (lunghezza 3 m) è disponibile per il cavo di alimentazione.
Staffa di montaggio per robot SCARA a 3 assi
Si tratta di varie staffe di montaggio per robot SCARA a 3 assi.
| Nome del prodotto | Robot applicabili | Immagine di installazione |
|---|---|---|
|
OVR3041K3-H OVR3046K10-H OVR3070K3-H |
 |
|
||
|
|
OVR3041K3-H OVR3046K10-H*1 OVR3070K3-H*1 |
 |
|
|
||
|
OVR3041K3-H | 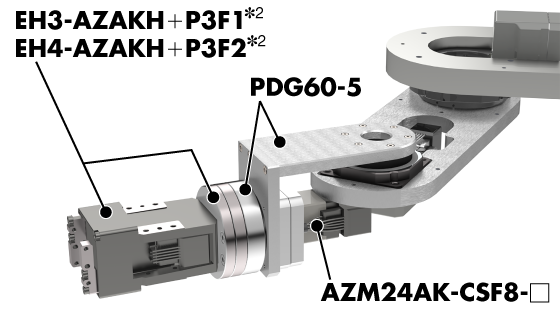 |
|
OVR3041K3-H OVR3046K10-H OVR3070K3-H |
 |
|
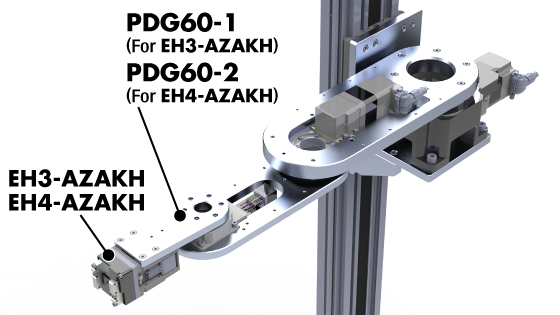
- *1 Quando il cilindro elettrico compatto della Serie DR viene utilizzato fino al limite della corsa, la pinza elettrica della Serie EH può interferire con il primo braccio.
- *2 In caso di combinazione con la pinza elettrica della Serie EH, acquistare separatamente l’adattatore per flangia robotica P3F1 (per EH3-AZAKH) o P3F2 (per EH4-AZAKH).
Prodotti correlati
Colonne di sollevamento elettrico Serie EL
Le colonne di sollevamento elettriche della serie EL sono un prodotto che può essere combinato con un robot per ampliare il raggio di movimento in direzione verticale. La linea di prodotti comprende modelli ad alta rigidità e alta precisione con corse che vanno da 50 a 300 mm. Contribuisce a ridurre i tempi di progettazione, assemblaggio e avviamento delle apparecchiature.
- Colonne di sollevamento per ampliare il raggio d’azione del robot
- Tempi ridotti per la progettazione, l’assemblaggio e l’avviamento dell’apparecchiatura
- Elevata rigidità e alta precisione
- Corsa 50/100/200/300 mm
- Motore di trasmissione: Serie AZ con encoder assoluto integrato senza batteria (alimentazione DC)