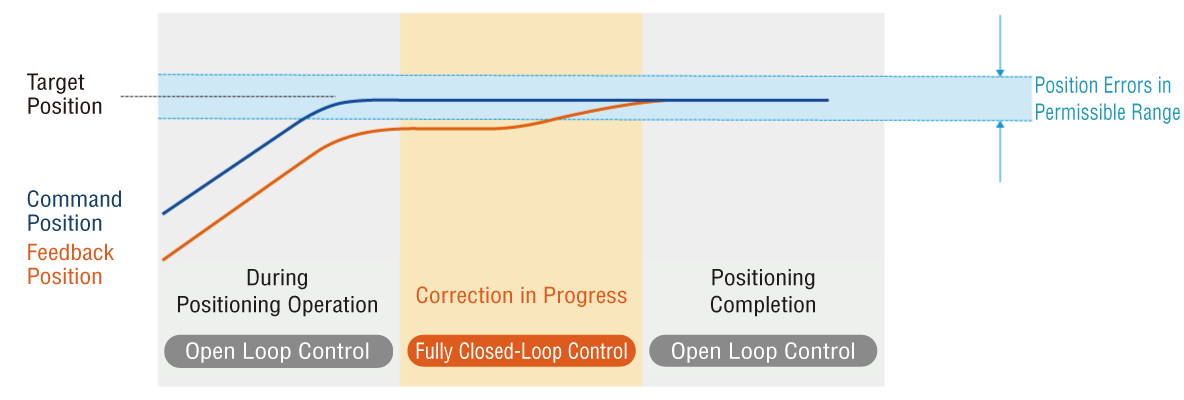
All’inizio del posizionamento, il controllo ad anello aperto viene eseguito sfruttando l’elevata risposta del motore passo-passo, mentre la correzione della posizione viene eseguita utilizzando il feedback di un sensore esterno una volta completato il comando di posizione.
Posizionamento ad alta precisione
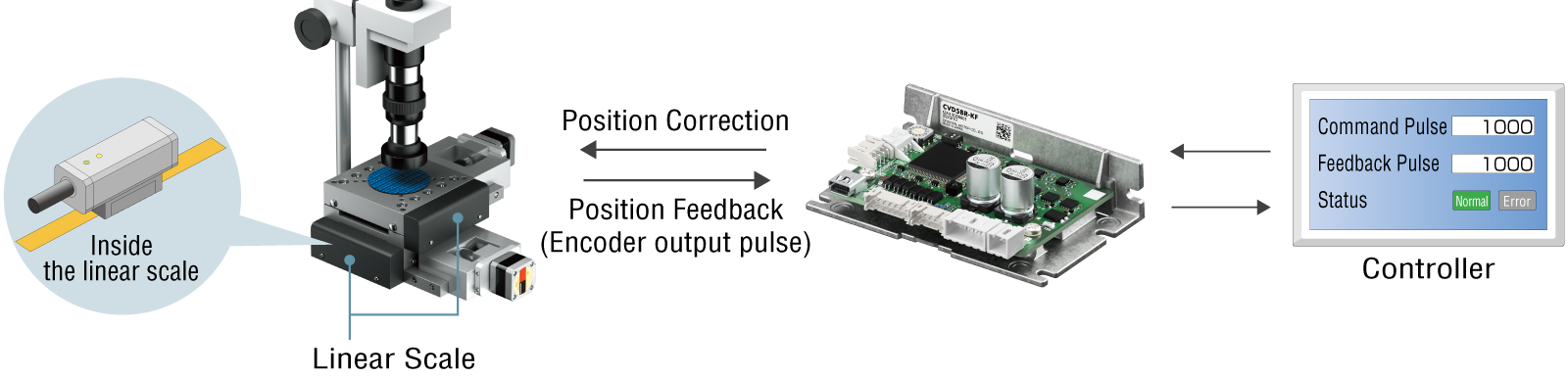
La differenza della posizione di retroazione rispetto alla posizione di comando viene corretta da un controllo ad anello chiuso che riporta direttamente la posizione all’interno del meccanismo. Contribuisce alla progettazione di apparecchiature che richiedono un posizionamento ad alta precisione a livello submicronico.
Riferimento
Movimento perso*1 Dati misurati
Anello aperto
Circuito ad anello chiuso
0,51 μm
0,15 μm (precisione target entro ±0,2 μm)
Condizioni di misurazione
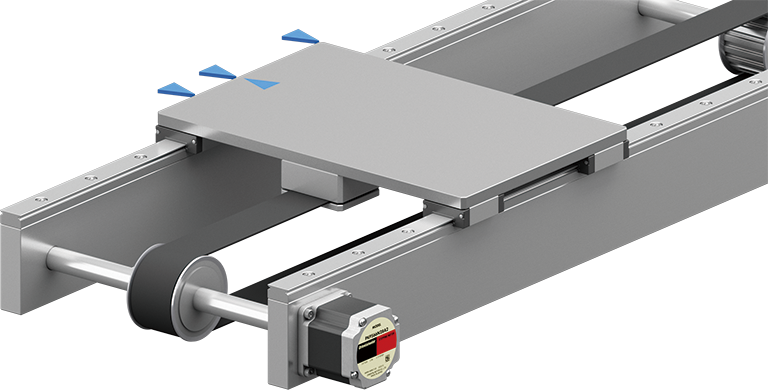
Avanzamento della vite di alimentazione 1 mm
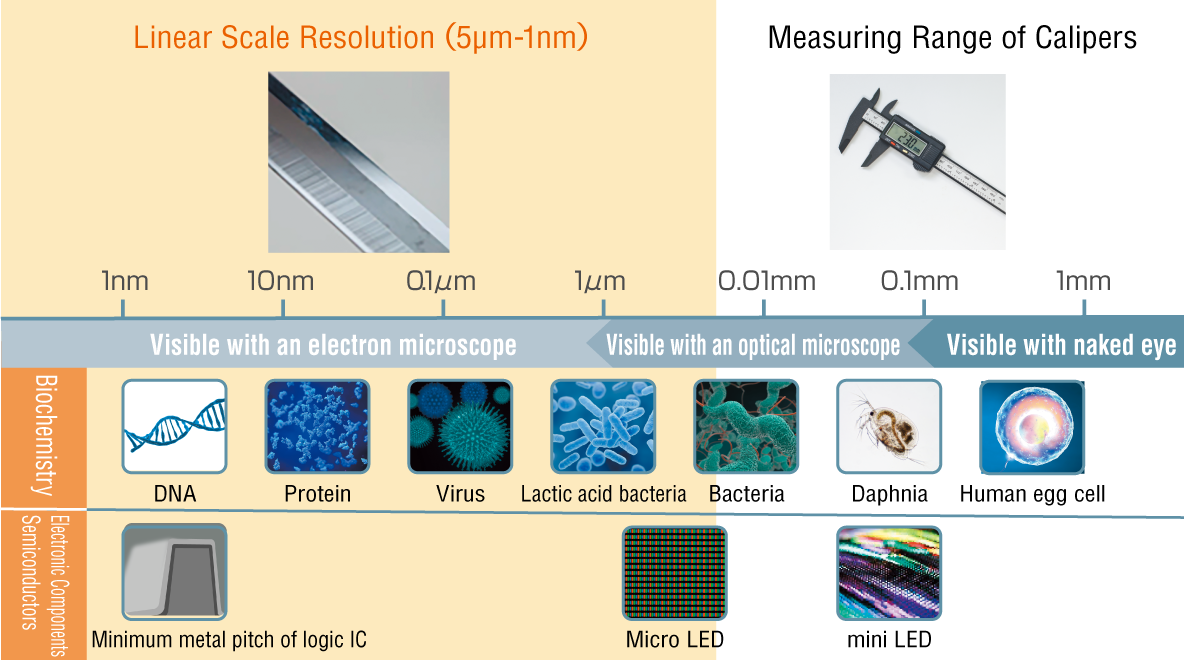
Risoluzione della scala lineare 0,1 μm
Intervallo di posizione: 1 cnt*2
Misurato con apparecchiature di misurazione laser
*1 Si tratta della differenza tra il posizionamento del motore nelle direzioni CW e CCW rispetto alla posizione di destinazione e la posizione di arresto nel senso di rotazione.
*2 La posizione viene corretta con un errore target di 1 conteggio di impulsi dell’encoder (-0,2~0,2 μm).
Risoluzione della scala lineare
Il motore passo-passo elimina la necessità di regolazione del guadagno e hunting
Non occorre alcuna regolazione del guadagno Non occorre alcuna regolazione del guadagno per adattarlo al meccanismo, come nel caso dei servomotori. Poiché le operazioni di posizionamento non utilizzano sempre il feedback dell’encoder, non è necessario regolare le pulegge, le camme e così via per adattarle al meccanismo e al carico.
Mantiene la posizione di stop senza fenomeno di hunting Al termine del posizionamento, il motore si arresta per effetto della propria forza di tenuta senza hunting. È ideale per applicazioni in cui le vibrazioni durante l'arresto rappresentano un problema.
Compatibile con vari sensori esterni per adattarsi al meccanismo
Sono supportati diversi tipi di sensori di varie aziende e si può utilizzare il feedback del tipo di sensore più adatto al meccanismo.
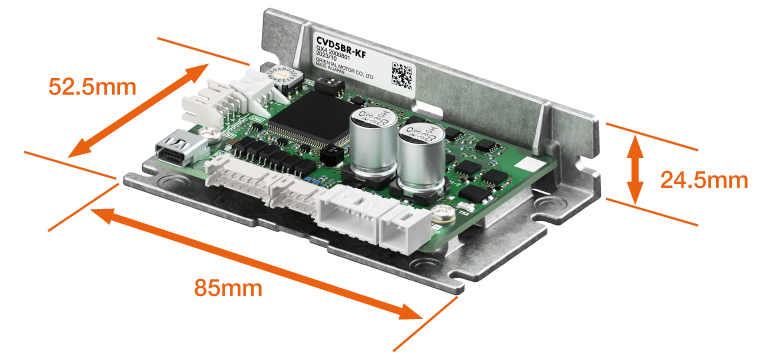
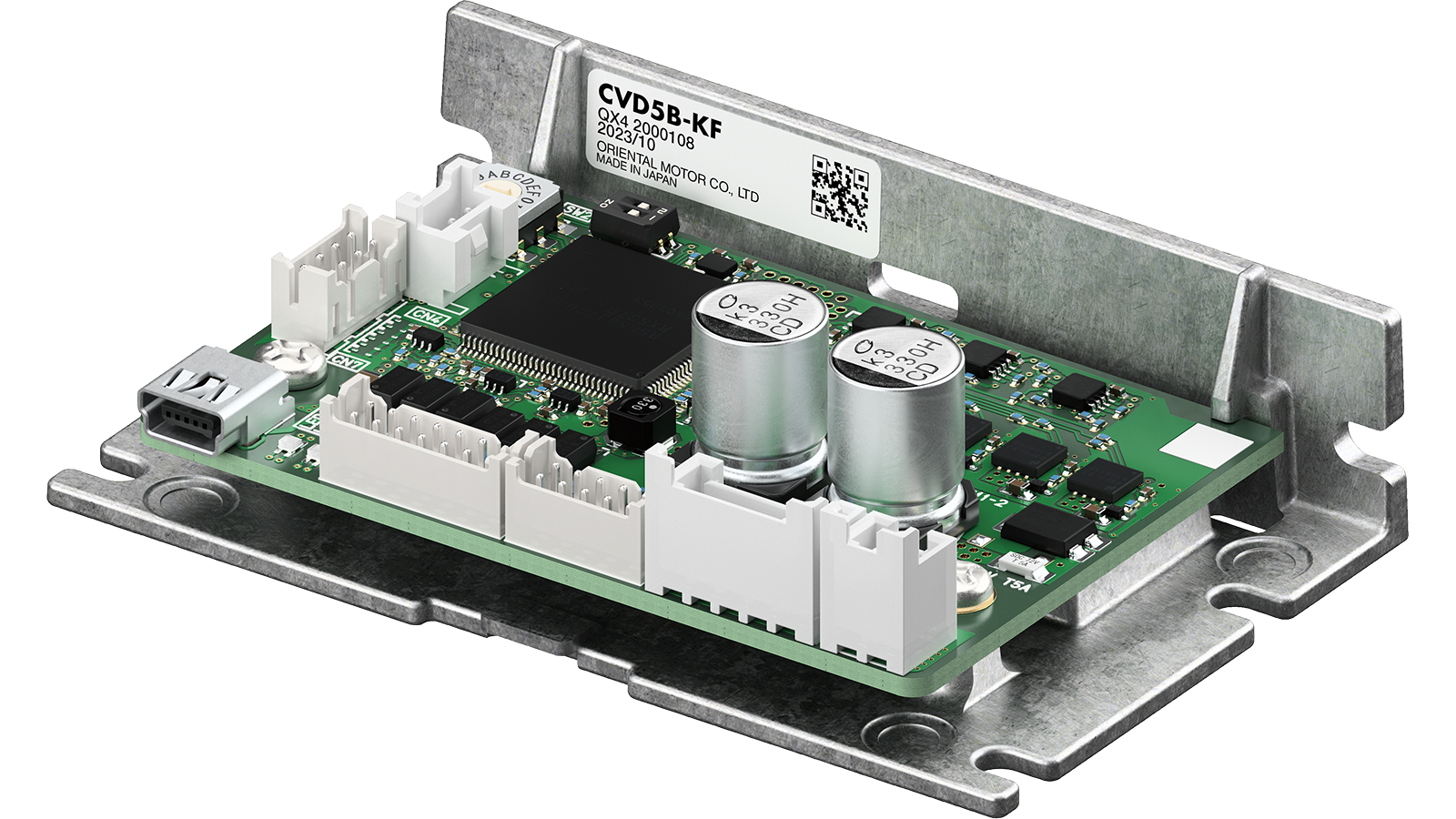
Dimensioni e metodi di installazione dei driver più comuni
Viene utilizzata una piastra di montaggio comune alla serie CVD e lo stesso passo del foro di montaggio. Sono disponibili driver con differenti orientamenti dei connettori per adattarsi al metodo di installazione del proprio driver.
Massa: 67 g
Driver che può essere selezionato in base al metodo di installazione
Versione angolare con piastra di montaggio
Con piastra di montaggio
I connettori sono orientati orizzontalmente rispetto alla scheda.
I connettori sono orientati verticalmente rispetto alla scheda.
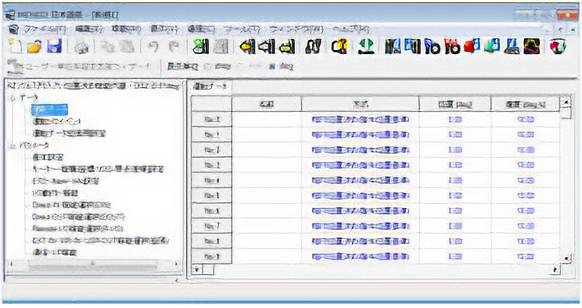
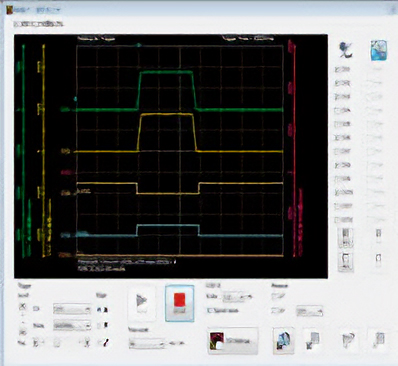
Facile gestione da PC con software di supporto MEXE02
Utilizzando il software di supporto MEXE02, è possibile impostare e modificare i dati di funzionamento e vari parametri, nonché gestire e monitorare varie condizioni.
*Il seguente è un elenco parziale dei nomi dei prodotti. Può essere combinato con prodotti contenenti i nomi dei prodotti qui elencati. Tuttavia, questo esclude quelli dotati di encoder.
*Un numero che indica la lunghezza del motore è specificato dove si trova la casella □ nel nome del prodotto.
*A (albero singolo) o B (albero doppio) che indica la configurazione in cui si trova la casella ■ nel nome del prodotto.
Driver bipolare per motore passo-passo a 2 fasi Driver per motore passo-passo a 5 fasi Serie CVD
Si tratta di driver con alimentazione DC per motori passo-passo a 2 e 5 fasi. Al driver è stata aggiunta una funzione microstep con un design a basse vibrazioni per ottenere un azionamento con vibrazioni ancora più ridotte.
Driver bipolare per motore passo-passo a 2 fasi Driver per motore passo-passo a 5 fasi Serie CVD versione S
Si tratta di driver con alimentazione DC per motori passo-passo a 2 e 5 fasi. Sono disponibili driver compatti modello con scheda a giorno, uno per il controllo del posizionamento del motore tramite comunicazione SPI e l’altro per il controllo tramite ingresso a treno d’impulsi.
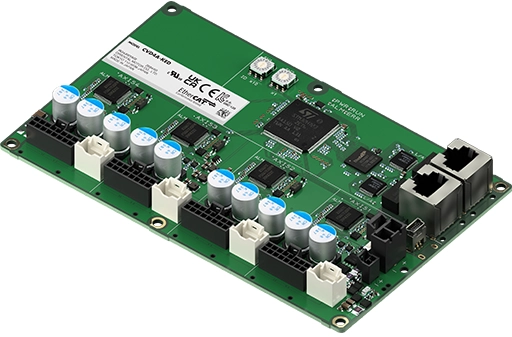
Driver per motori passo-passo a 2 fasi/5 fasi Serie CVD versione multiasse Compatibile con EtherCAT
Un driver multiasse con alimentazione DC per il pilotaggio di motori passo-passo a 2 e 5 fasi. È possibile il controllo su quattro assi ed è supportato EtherCAT. Contribuisce a risparmiare spazio e cablaggio nelle apparecchiature del cliente.
Driver per motore passo-passo a 5 fasi Serie CVD versione SC
Controllo della velocità mediante ingresso di marcia avanti e indietro senza utilizzare un generatore di impulsi. È possibile utilizzare questo driver come motore con controllo della velocità.