Small Robots OVR
4-Axis Articulated Robot
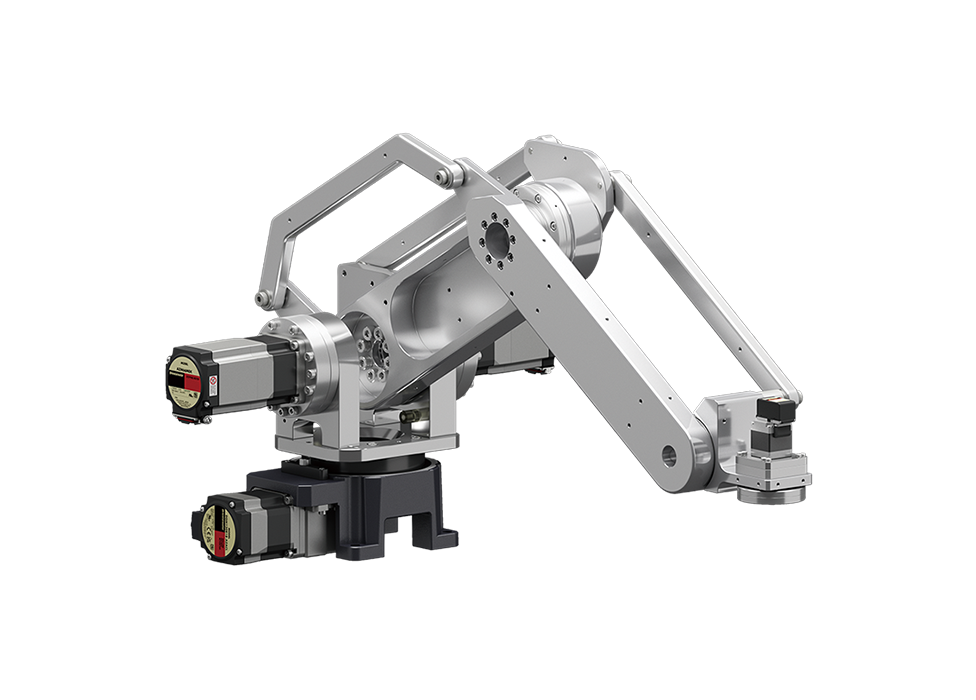
- Parallel Link Mechanism
- Horizontally Level at All Times to Allow for Stable Transport of Components
- Maximum Payload 5 kg
- Maximum Reach (Horizontal) 480/680/880 mm
- Drive Motor: AZ Series with battery-free built-in absolute encoder (DC input)
Caratteristiche |Robot articolati a 4 assi
- Movimentazione orizzontale leggera e stabile grazie al meccanismo a bracci paralleli
- L’auto-manutenzione è possibile
- Personalizzabile
- Robot controller facile da gestire
- Utilizzo della serie AZ con encoder assoluto integrato senza batteria
- Strumenti utili prima di installare i robot
- Vari dati
- Specifiche
- Facile implementazione dei robot nei sistemi esistenti
- Esempi di adozione
- Staffa di montaggio dell’asse di piegatura del polso per robot articolati a 4 assi
Movimentazione orizzontale leggera e stabile grazie al meccanismo a bracci paralleli
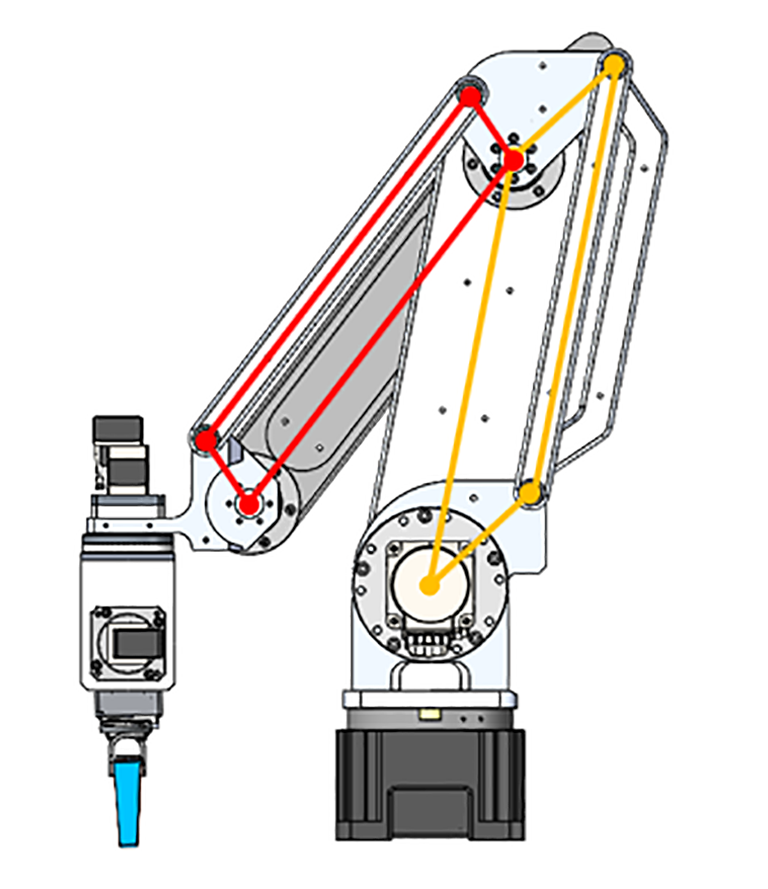
TIl meccanismo di collegamento parallelo offre i seguenti vantaggi:
- Carico massimo trasportabile di 5 kg: si ottiene posizionando i motori che azionano i due bracci in basso, riducendo così il peso sui giunti.
- Movimentazione orizzontale: L'estremità del braccio robotico può rimanere strutturalmente livellata rispetto alla superficie di installazione, consentendo un movimento orizzontale stabile.
L’auto-manutenzione è possibile

I motori di ciascun asse e gli attuatori elettrici possono essere sostituiti dal cliente. Riduce il carico di manutenzione (costi e tempi) dopo l’installazione.
- *Durante la manutenzione e l’assistenza sostituiremo anche i motori. Contattare la filiale o l’ufficio vendite Oriental Motor più vicino.
Personalizzabile

Al momento dell’acquisto, la lunghezza del braccio può essere personalizzata in base al proprio utilizzo. (Variazione sbraccio 580 mm, 780 mm)
Robot controller facile da gestire

MRC01 è un robot controller in grado di controllare i robot equipaggiati con la serie AZ.
Il software di programmazione MRC Studio (gratuito) è così semplice che anche chi non ha esperienza a controllare i robot sarà in grado di padroneggiarlo rapidamente.

È disponibile anche la serie MRCU, che combina il robot controller Serie MRC01 e driver AZ (fino a 8 assi) in un unico pacchetto.
Riduce le complessità legate al controllo durante l’installazione dei robot e accelera i tempi di avviamento.
Fare clic qui per i dettagli sul robot controller integrato Serie MRCU e sui driver
- Nota: quando si utilizza il robot, è bene considerare la sua sicurezza in quanto robot industriale. (Non può essere utilizzato come robot collaborativo)
Utilizzo della serie AZ con encoder assoluto integrato senza batteria
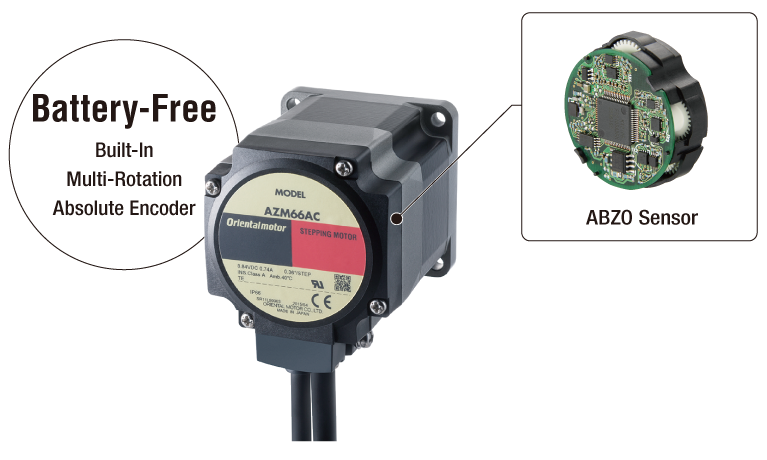
Tutti gli assi utilizzano la serie AZ αSTEP (alimentazione DC).
La modalità Assoluta elimina la necessità di sensori esterni, riduce il cablaggio e la manutenzione eliminando la necessità di gestione della batteria.
L’alimentazione DC semplifica il percorso dei cavi di potenza. Le modifiche all’installazione e alla disposizione della linea possono essere adattate con grande flessibilità.
Strumenti utili prima di installare i robot
MRC Studio Simulator

Questo software gratuito consente di simulare i movimenti effettivi su PC in fase di valutazione dell'introduzione di un robot, senza bisogno del robot stesso o dell'MRC01.
Fare clic qui per i dettagliMRC Reality

I robot virtuali possono essere configurati in uno spazio reale per simulare le operazioni.
Sono disponibili app per smartphone/tablet e per visori VR (Meta Quest 3).
Informazioni dettagliate sul prodotto
Per informazioni dettagliate sul prodotto, come specifiche, caratteristiche, dimensioni, CAD, manuali operativi, ecc. fai clic sul link del nome del prodotto qui sotto.
OVR4048K5-V (raggio massimo 480 mm)
OVR4068K5-V (raggio massimo 680 mm)
OVR4088K5-V (raggio massimo 880 mm)
Specifiche
| Nome del prodotto |

OVR4048K5-V |

OVR4068K5-V |

OVR4088K5-V |
|
|---|---|---|---|---|
| Numero di assi | 4 assi | |||
| Tensione di ingresso | 24 VDC | |||
| Raggio massimo | Verticale | 570 mm | 750 mm | 900 mm |
| Orizzontale | 480 mm | 680 mm | 880 mm | |
| Massa trasportabile | 5 kg | |||
| Tempo di ciclo standard*1 | 0,7 sec. | |||
| Area di movimento*2 | Asse S (rotazione) | ±170 gradi | ||
| Asse L (braccio inferiore) | −27 bis +80 gradi | |||
| Asse U (braccio superiore) | −58∼+35 gradi | |||
| Asse R (rotazione del polso) | ±180 gradi*3 | |||
| Ripetitività del posizionamento*4 | ±0,05 mm | |||
| Inerzia ammissibile (asse di rotazione del polso) | 0,069 kgm² | |||
| Massa corporea | 16 kg | 17 kg | 18 kg | |
| Tipo di installazione | Montaggio a pavimento | |||
- *1: il tempo necessario per spostarsi avanti e indietro tra 2 punti, 25 mm di altezza e 300 mm di larghezza, con un carico di 1 kg. Tempo di ciclo quando viene utilizzato il robot controller MRC01.
- *2: si tratta dell’intervallo di movimento nella direzione ± rispetto alla posizione iniziale dell’installazione (0 gradi).
- *3: ±170 gradi quando si utilizza il robot controller MRC01.
- *4: in base ai valori delle specifiche di ciascun riduttore di assi.
- *La capacità di alimentazione consigliata è di 24 VDC 500 W
Facile implementazione dei robot nei sistemi esistenti
La serie MRC si collega al controllore host tramite EtherNet/IP™ per il controllo diretto. Gli Small Robots OVR o i robot interni possono essere facilmente aggiunti alle attrezzature esistenti senza apportare modifiche significative al sistema di controllo. Il software di programmazione MRC Studio (gratuito) può essere utilizzato per programmare il robot. Gli Small Robots OVR dispongono di informazioni sul meccanismo di preinserimento, rendendo più semplice l’esecuzione delle impostazioni iniziali.
- *EtherNet/IP™ è un marchio commerciale di ODVA.

Esempio di prezzo della configurazione
| Produktname | Quantità | |
|---|---|---|
| Robot | OVR4048K5-V | 1 |
| Robot controller e driver integrato | MRCU4AK | 1 |
| Cavo tra motore e driver (3 m) | CCM030Z1EFF | 1 |
| CCM030Z1EFR | 2 | |
| CCM030Z2AAR | 1 | |
| Cavo di alimentazione | CC09MRCU030 | 1 |
- ● La serie MRCU può essere utilizzata anche con una connessione I/O (senza un controllore host).
- ● Inoltre, sono necessari un’alimentazione in corrente continua e un end effector.
- ● Per il odice del cavo necessario per l’azionamento fare riferimento allo strumento.
Esempi di adozione
Presentazione di esempi di robot articolato verticale a 4 assi.
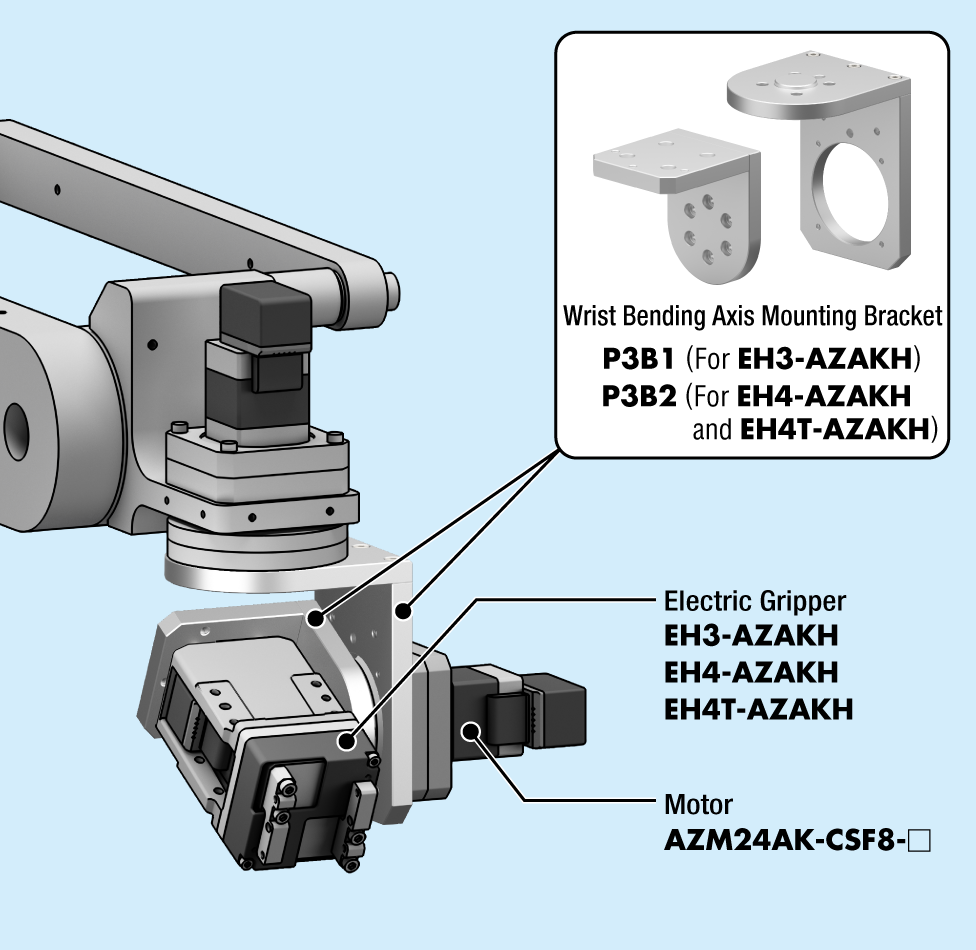
Staffa di montaggio dell’asse di piegatura del polso per robot articolati a 4 assi
Poiché la punta del braccio è sempre orientata verso il basso grazie al meccanismo a leve, per le operazioni di pick-and-place è necessario controllare solo 4 assi.
Tuttavia, ci sono molti casi in cui è difficile da usare senza l’elemento di sollevamento e abbassamento del polso.
La “staffa di montaggio dell’asse di piegatura del polso” è uno strumento per risolvere il problema.
Applicazioni
- La pinza elettrica viene sollevata di 90 gradi per afferrare il pezzo dal ripiano e posizionarlo nella scatola di imballaggio.
- Il pezzo da lavorare viene prelevato, viene scattata un’immagine del retro e viene inscatolato.
- Lavorare con la pinza e la torcia leggermente inclinati.