Linea di prodotti equipaggiati con αSTEP AZ - Pinza elettrica Serie EH
Acquistare separatamente pinze elettriche, driver e cavi di collegamento.
Pinze elettriche
Modello a 2 dita
| Maximum Gripping Force | Stroke (Both sides) |
Minimum Travel Amount (Both sides) |
Size | Mass | |
|---|---|---|---|---|---|

|
7 N | 0 to 15 mm | 0.02 mm | W 42.5 mm × D 80.5 mm × H 36 mm | 200 g |

|
25 N | 0 to 25 mm | W 48.5 mm × D 91 mm × H 46 mm | 380 g |
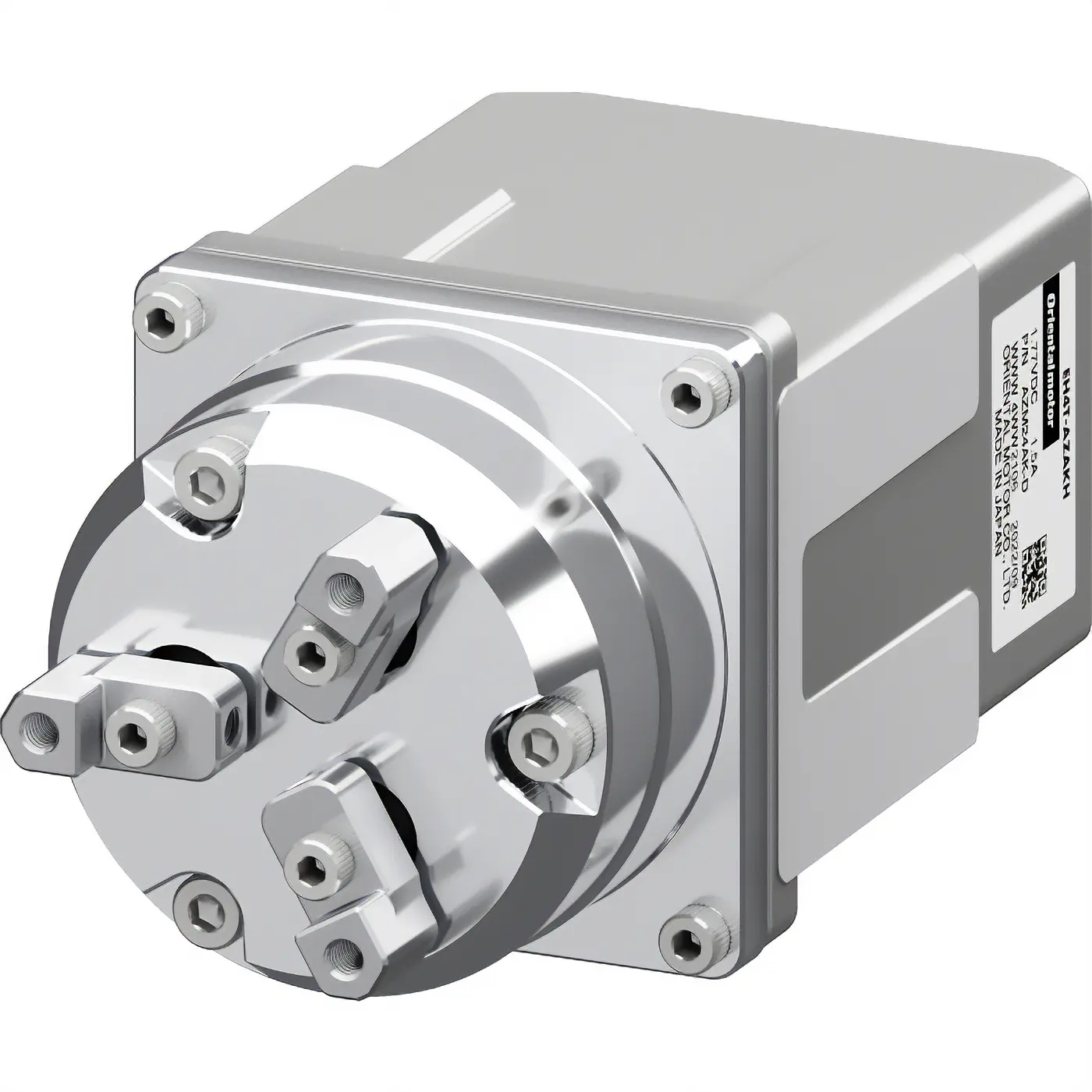
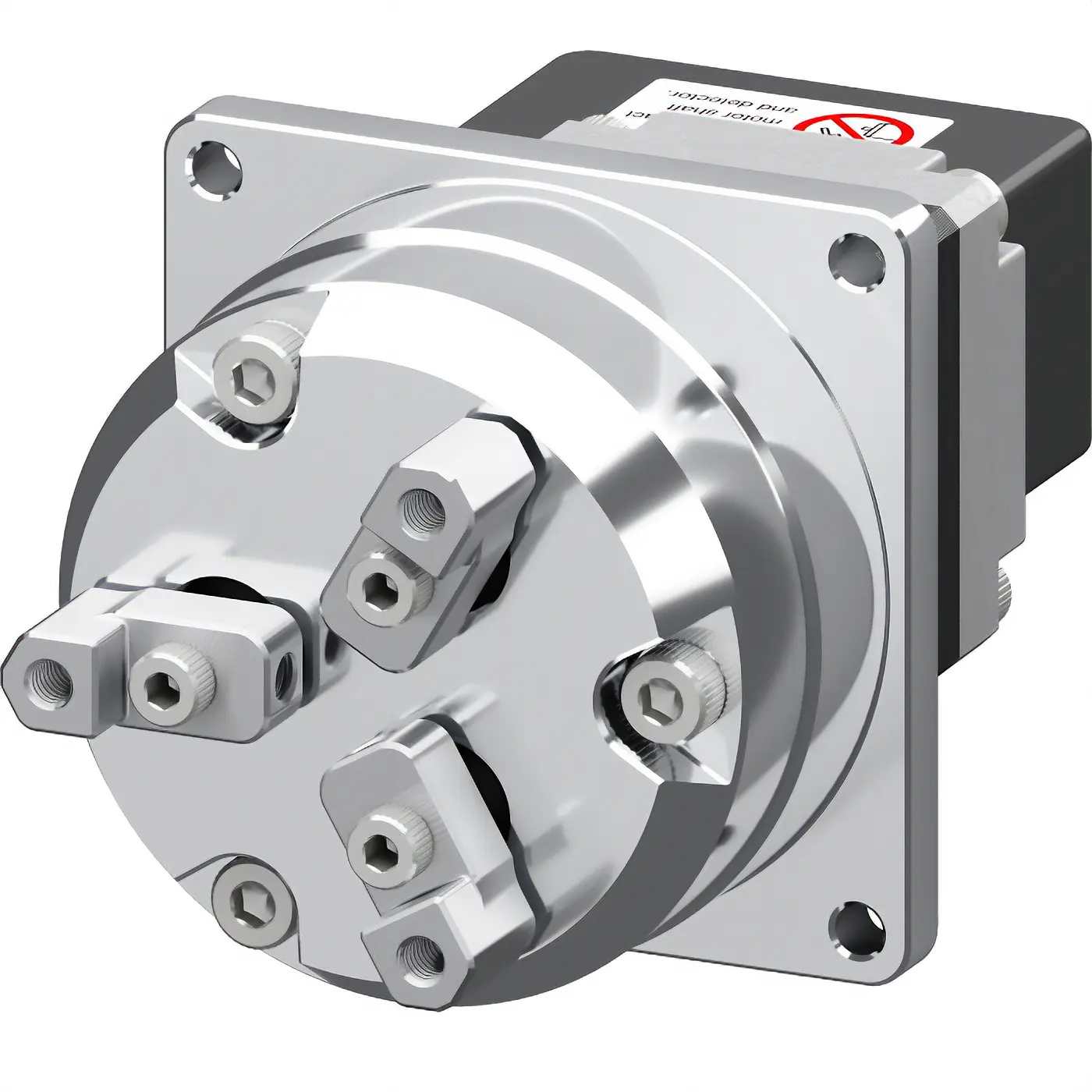
Modello a 3 dita
| Forza di presa massima | Diametro di presa*1*2 | Dimensioni | Massa | |
|---|---|---|---|---|
|
50 N | Impugnatura del diametro esterno dell’oggetto da afferrare φ2~φ24 mm Impugnatura del diametro interno dell’oggetto da afferrare φ14~φ36 mm |
L 48,5 mm × P 98 mm × A 46 mm | 380 g |
|
L 47 mm × P 90,5 mm × A 46 mm | 280 g |
- *1
- Questo valore tiene conto di una distanza di circa 0,5 mm (valore minimo) rispetto al diametro (D) dell’oggetto afferrato.
- *2
- Questo è il caso in cui il diametro (d) dell’accessorio è φ6 mm.
Le flange sono disponibili per l’installazione della serie EH su robot industriali disponibili in commercio (robot collaborativi).
Due pezzi, uno per il lato del punto di presa e l’altro per il lato del robot.
La flangia sul lato del robot è modellata in conformità alla norma ISO 9409-1 (JIS B 8436).
Introduzione all’adattatore flangia robot e ai robot industriali che possono essere combinati

Driver
| Interfaccia | Alimentazione | ||
|---|---|---|---|
| Posizionatore integrato (compatibile con Modbus) | 24 VDC | ||
| Ingresso a treno d’impulsi con comunicazione RS-485 | |||
| Ingresso a treno d’impulsi | |||
| Compatibile con EtherCAT | |||
| Compatibile con EtherNet/IP™ | |||
| Compatibile con PROFINET | |||
 |
Compatibile con EtherCAT | ||
| Compatibile con EtherNet/IP™ | |||
| Compatibile con PROFINET | |||
| Posizionatore integrato (compatibile con Modbus) | |||
| Ingresso a treno d’impulsi con comunicazione RS-485 | |||
Cavo di collegamento/Cavo di collegamento posa mobile
- Il cavo motore dal motore non può essere collegato direttamente al driver. Considerare anche il cavo di collegamento.
- Utilizzare cavi di collegamento posa mobile per applicazioni in cui i cavi sono piegati.
| Lunghezza [m] | |
|---|---|
| 0,5~20 |