Electric Grippers
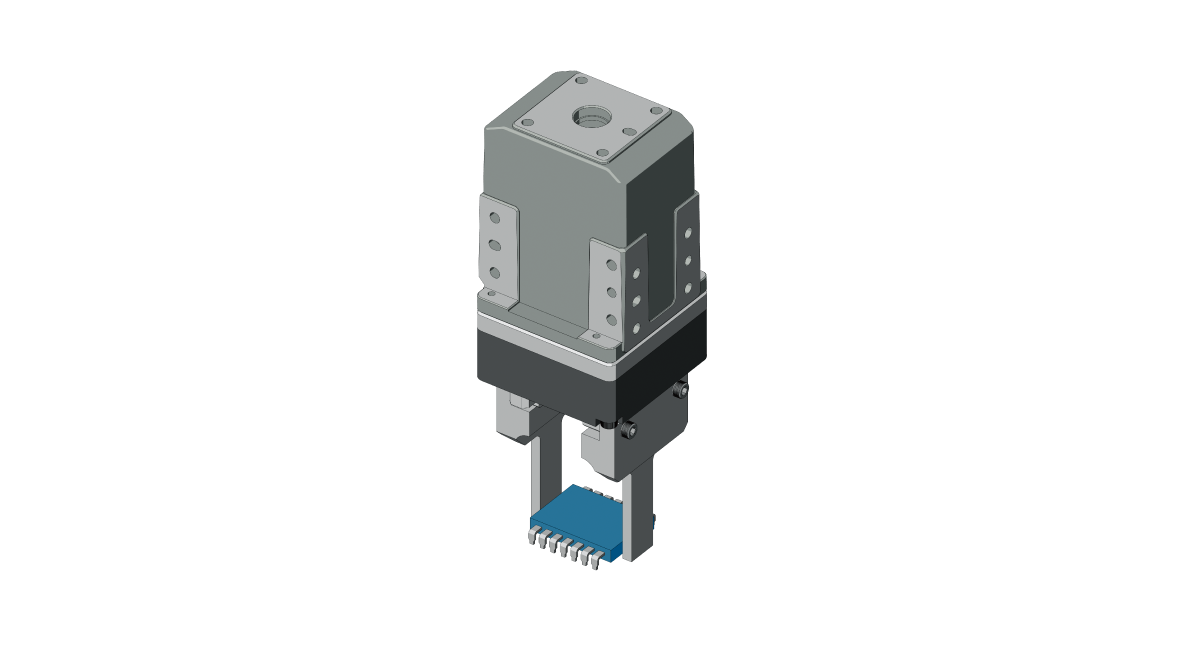
EH Series
- Achieve Delicate Grasp
- Equipped with Closed Loop Stepper Motor
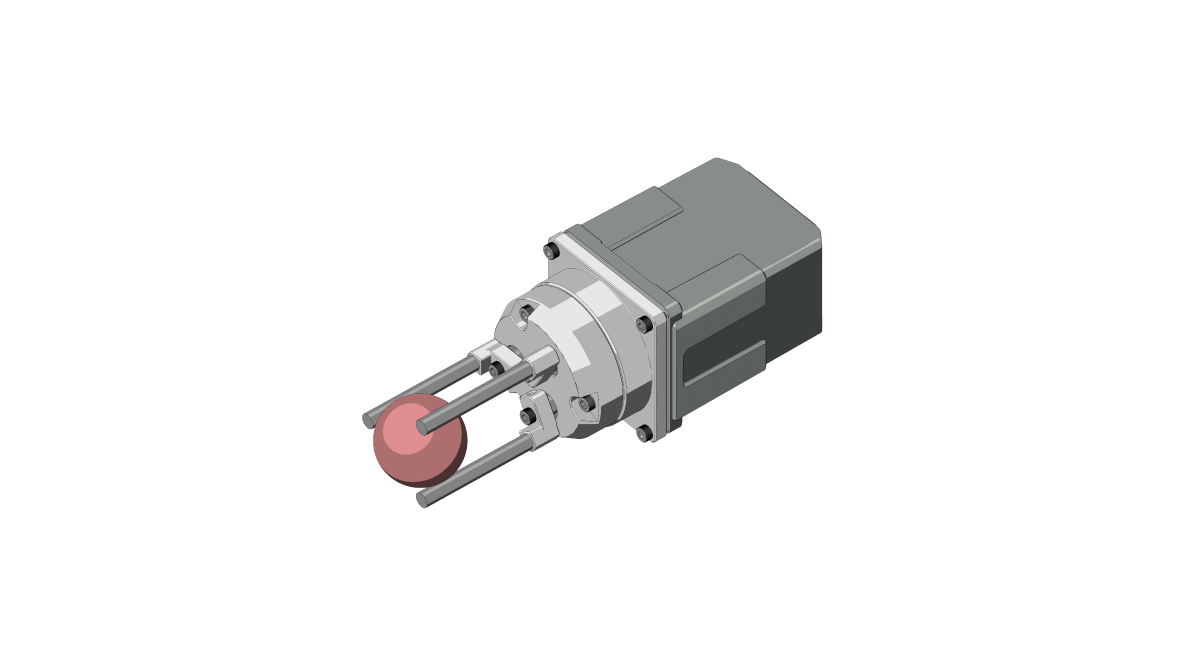
- 2-Finer/3-Finger Type Available
- Maximum Gripping Force 50 N
Caratteristiche |Pinza elettrica Serie EH equipaggiata con motore αSTEP Serie AZ
Funzioni principali
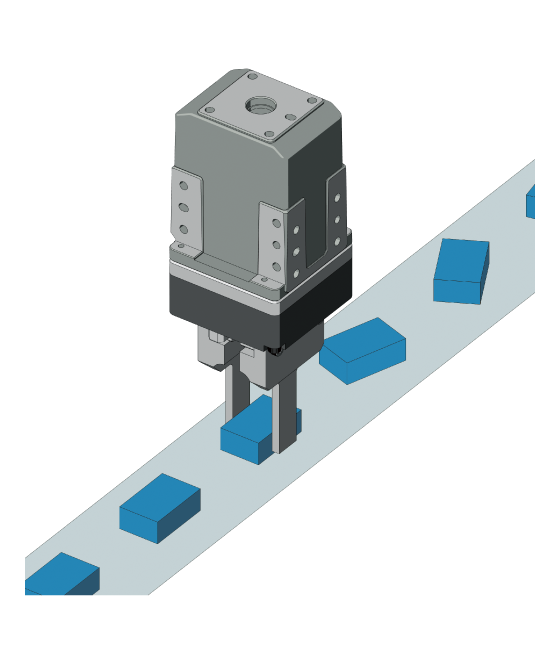
Un approccio "Delicate Grip" per un'ampia varietà di carichi
La corrente di esercizio può essere impostata a step di 1%, consentendo di regolare la forza di presa.
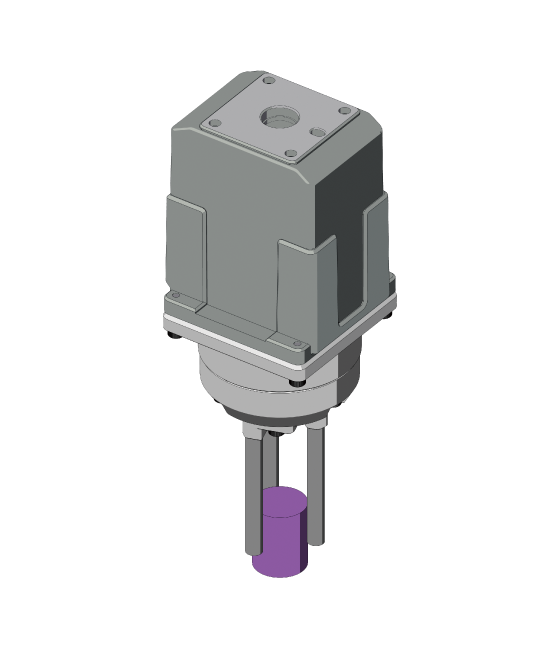
Presa
Si possono afferrare carichi fragili e facilmente deformabili.
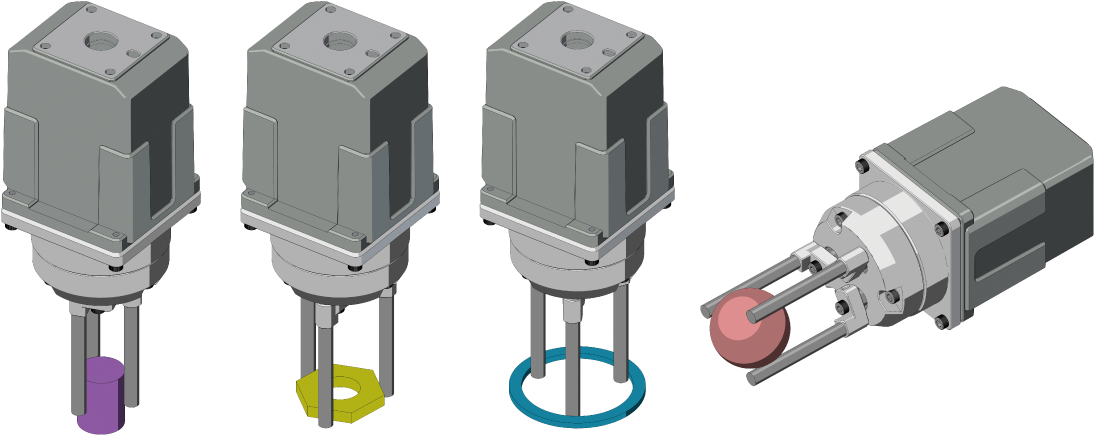
Il modello a 3 dita è adatto per afferrare oggetti sferici, cilindrici o facilmente deformabili.
Allineamento
I carichi possono essere orientati e allineati.
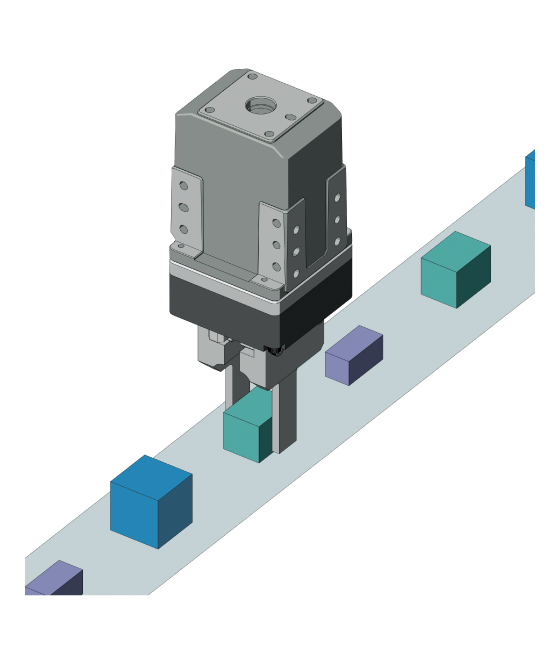
Misura
La dimensione del carico può essere determinata e misurata.
Per operazioni delicate, la serie EH è consigliata rispetto ad una pinza pneumatica
Regolare la forza di presa in incrementi dell’1% (a 2 e 3 dita)
Non serve alcuna regolazione di pressione (valvola di riduzione della pressione)come nel caso di una pinza pneumatica. La forza di presa può essere regolata facilmente e finemente con impostazioni digitali.
Regolare la velocità in incrementi di 0,02 mm/s (a 2 dita)
La regolazione con il controller di velocità di una pinza pneumatica (valvola di controllo della velocità) non è necessaria.
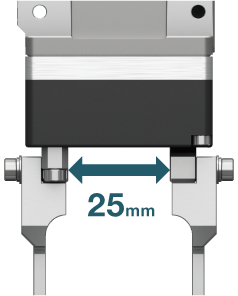
Regolare la corsa in incrementi di 0,02 mm (a 2 dita)
Questa pinza sfrutta l’elevata precisione di posizionamento del motore passo-passo.
Monitoraggio della posizione con un sensore ABZO (a 2 e 3 dita)
Informazioni dettagliate sulla posizione possono essere monitorate. Quando si utilizza il modello a 2 dita, le informazioni sulla posizione possono essere utilizzate anche per determinare la dimensione del carico.
Il modello a 2 dita e il modello a 3 dita possono essere utilizzati per diverse applicazioni
Confronto dei modelli a 2 e 3 dita
| Tipo | A 2 dita*1 | A 3 dita | ||
|---|---|---|---|---|
| Forma del carico adatta per la presa |
|
| ||
| Range di spostamento |
 |
 |
 |
|
| Quando è aperto: P.C.D. φ30,9 mm |
Quando chiuso: P.C.D. φ7 mm |
|||
 |
 |
|||
| Larghezza di apertura: P.C.D. φ23,9 mm |
||||
| Max. forza di presa [N] | 25 | 50 | ||
| Carico ammissibile [N] (Carico assiale ammissibile [N]*2) |
5 | 15 | ||
| Massa [kg] | 0,38 | 0,38 (con cover di montaggio) 0,28 (senza cover di montaggio) |
||
- *1
- I valori corrispondono alle specifiche per il modello 4.
- *2
- Questo è per il modello a 3 dita.
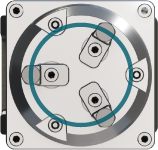
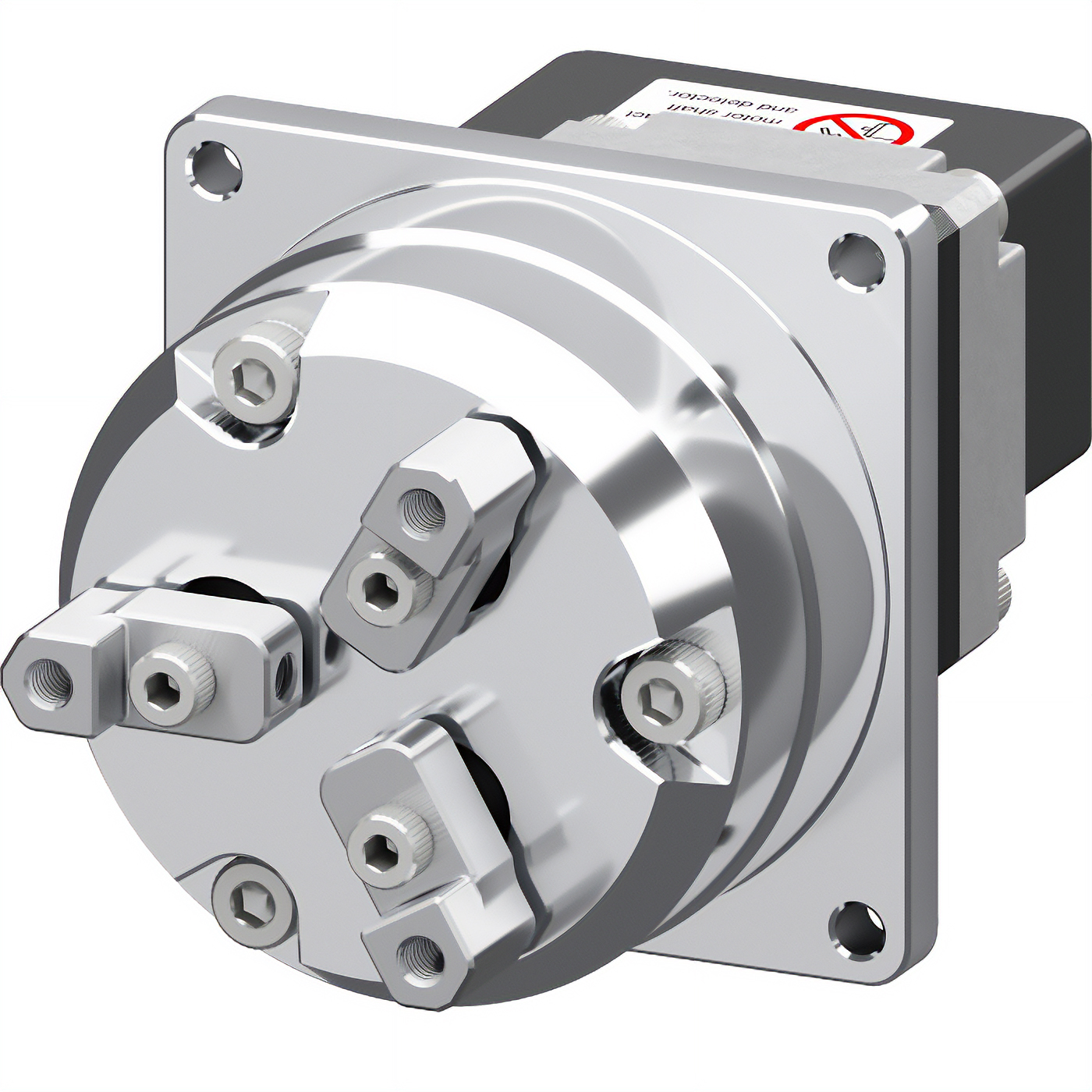
Caratteristiche del modello a 3 dita
- A causa dell’ampio carico assiale ammissibile, è adatto per applicazioni con carichi elevati.
- Ogni dito si apre e si chiude durante la rotazione.
Vantaggi della serie AZ in dotazione
Encoder assoluto senza batteria
È dotato di un piccolo encoder assoluto meccanico senza batteria (sensore ABZO). In questo modo è possibile migliorare la produttività e ridurre i costi.
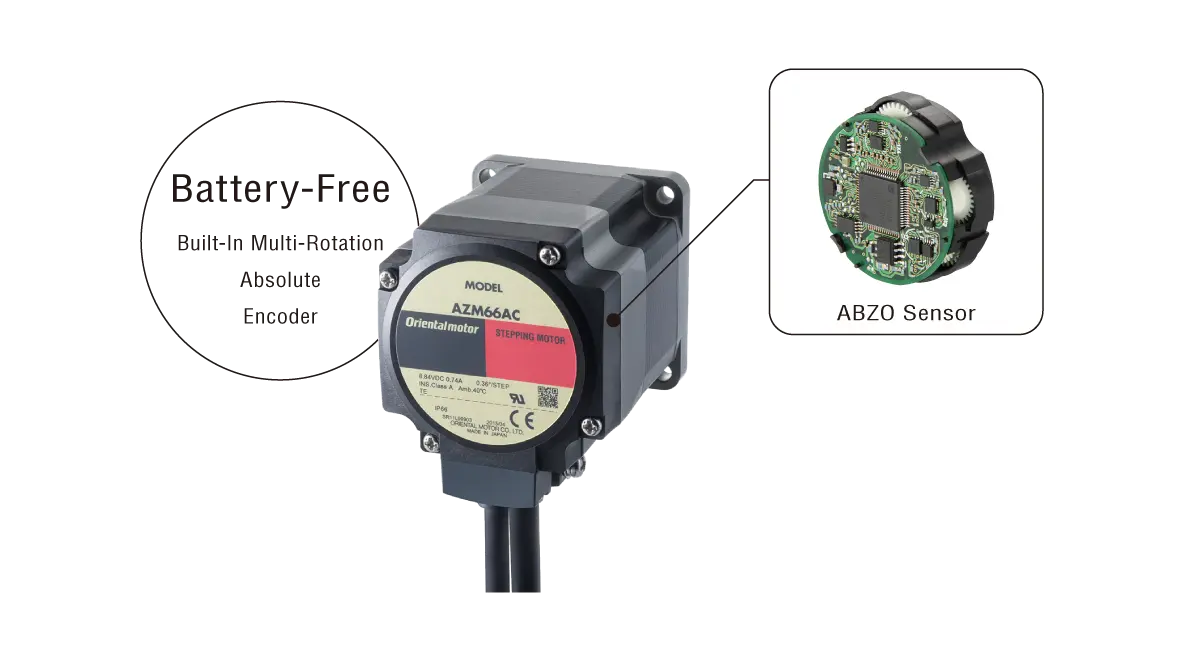
- Sensore meccanico
Conserva le informazioni sul posizionamento anche in assenza di alimentazione - Encoder assoluto multigiro
Il rilevamento della posizione assoluta è possibile con ±900 (1.800) giri dell'albero motore dalla posizione iniziale
Non è richiesto alcun sensore esterno
Poiché si tratta di un sistema assoluto, non sono richiesti sensori homing o sensori di limite.
Vantaggi
- Miglioramento dell’homing ad alta velocità e della precisione di homing
- Costi ridotti
- Cablaggio semplice
- Non influenzato dal malfunzionamento del sensore esterno
Senza batteria
I sensori meccanici non richiedono batterie.
Le informazioni di posizionamento sono gestite meccanicamente dal sensore ABZO.
Vantaggi
- Non è necessario sostituire le batterie
- Possibilità illimitate di installazione dei driver
- Adatto alla spedizione all'estero
Semplificazione del programma principale tramite la funzione sequenza
La Serie AZ è dotata di una vasta gamma di funzioni di sequenza, come impostazioni del timer per operazioni collegate e durante le operazioni, istruzioni condizionali e operazioni in loop (esclusi alcuni modelli).
Può essere configurata utilizzando il software di supporto MEXE02, che semplifica il programma di sequenza del sistema host.

- Valore di configurazione dei dati di posizionamento (max. 256)
- Segnali di I/O fisici per uso generale (Ingresso 10, Uscita 6)
- Segnali di I/O remoti (Ingresso 16, Uscita 16)
Linea di prodotti equipaggiata con motori Serie AZ
Poiché i motori installati sono gli stessi, i metodi di funzionamento e manutenzione sono gli stessi.
Attuatori elettrici (Serie AZ in dotazione)
| Slitte lineari elettriche | Cilindri elettrici | Cilindri elettrici compatti | Sistema a pignone e cremagliera | Pinze elettriche | Attuatori rotanti ad albero cavo |
|---|---|---|---|---|---|
| Serie EZS | Serie EAC | Serie DR Serie DRS2 |
Serie L | Serie EH | Serie DGII |
- L’alimentazione del motore installato differisce da una serie all’altra. Fare riferimento a ciascuna pagina della Serie per la linea di prodotti dettagliata.
Caratteristiche del driver e linea di prodotti
Driver che possono essere selezionati per corrispondere al controllore host
La gamma è disponibile per una varietà di controlli, sistemi e interfacce.
| Driver Type | Compatible Interfaces | Single Axis Driver | |
|---|---|---|---|
| DC Input | |||
 |
|||
| Network Compatible | Drivers are controlled directly from a host control device through industrial network | EtherCAT | ○ |
| EtherNet/IP™ | ○ | ||
| PROFINET | ○ | ||
| Built-in Controller | Operation data is built into the driver. Controllable by Modbus (RTU) and I/O. | Modbus (RTU) I/O |
○ |
| Pulse Input with RS-485 Communication | Controlled by pulse signal. Motor status information can be monitored via Modbus (RTU). | Pulse input Modbus (RTU) |
○ |
| Pulse Input | Controlled by pulse signal | Pulse input | ○ |
- DC input mini drivers and multi-axis driver lineups are also available.
Facile gestione da PC con software di supporto MEXE02
Utilizzando il software di supporto MEXE02, è possibile impostare e modificare i dati di funzionamento e vari parametri, nonché gestire e monitorare varie condizioni.
Fare clic qui per scaricare il software di supporto
Supporto completo dall'avvio alla manutenzione con una varietà di funzioni
-
Avvio e diagnostica
Vengono fornite funzioni utili per il controllo del cablaggio e il funzionamento del test.
- Impostazione e salvataggio dei dati di funzionamento
- Monitoraggio I/O
- Teaching, funzionamento da remoto
-
Regolazione
Di seguito sono riportate le funzioni che possono aiutare a regolare il funzionamento del motore dopo l'installazione dell'apparecchiatura.
- Oscilloscopio
-
Diagnosi e manutenzione
Le funzioni di diagnosi e manutenzione sono disponibili per risolvere i problemi e per intervenire dopo l'avvio del funzionamento.
- Monitor dell’allarme
- Monitor informazioni dell’unità
- Monitor dello stato
-
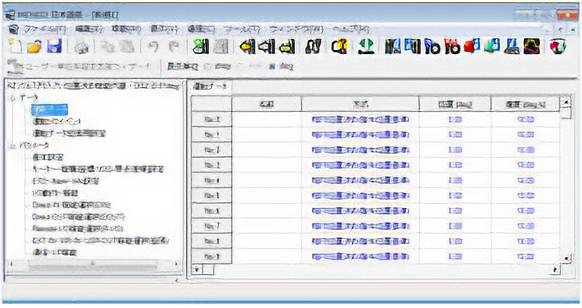
Schermo di configurazione dei dati di funzionamento/parametri -
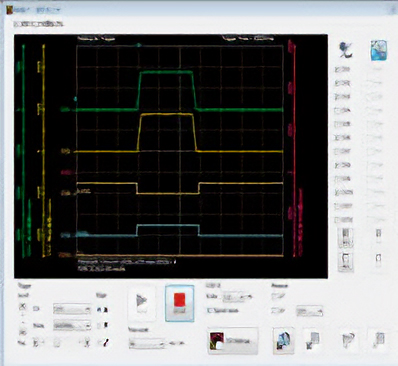
Oscilloscopio
Fare clic qui per i dettagli sulle funzioni del software di supporto
Applicazioni
Usare una pinza come organo terminale della Serie EH, compatta e leggera, riduce il carico sugli altri assi. Ciò contribuisce alla riduzione del tempo ciclo e delle dimensioni.
Utilizzabile come effettore finale per robot
Per robot articolati

Per robot cartesiani

| EH3-AZAKH | EH4-AZAKH | EH4T-AZAK |
|---|---|---|
 |
 |
 |
| L 42,5 mm × P 80,5 mm × A 36 mm | L 48,5 mm × P 91 mm × A 46 mm | L 47 mm × P 90,5 mm × A 46 mm |
| Massa: 200 g | Massa: 380 g | Massa: 280 g |
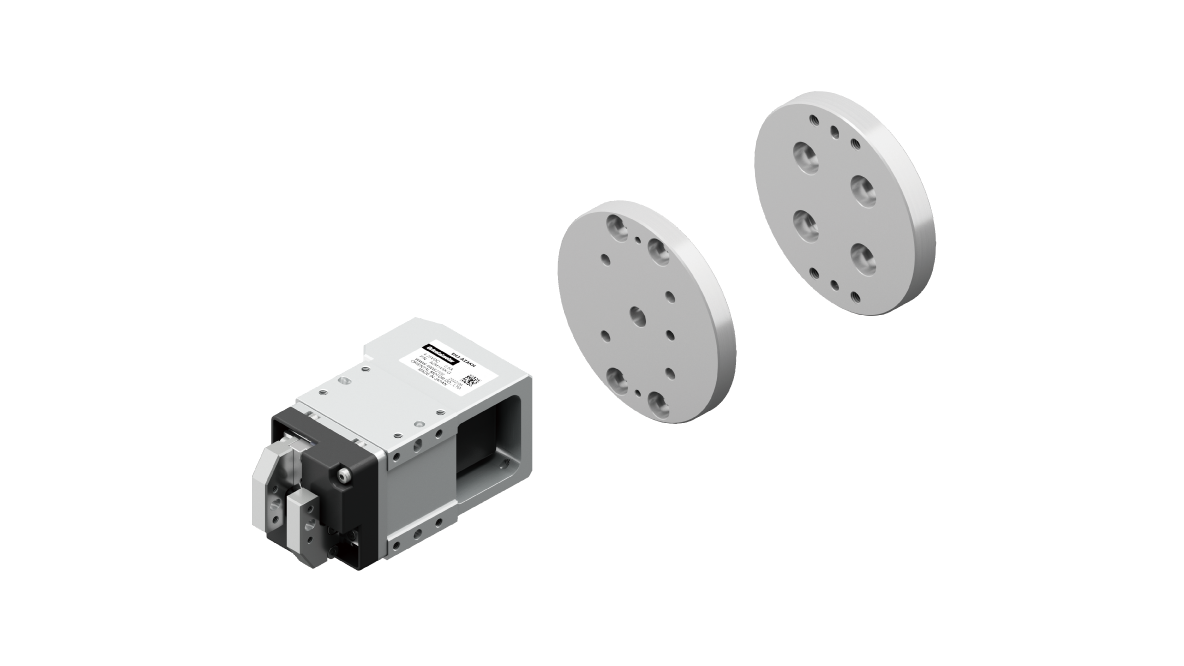
Facile installazione su robot industriali disponibili in commercio
Le flange sono disponibili per l’installazione della serie EH su robot industriali disponibili in commercio (robot collaborativi).
Le flange sul lato del robot sono sagomate in conformità alla norma ISO 9409-1 (JIS 8436).

Prodotti correlati
Mini driver Serie AZ per Alimentazione DC
Si tratta di un mini driver progettato per essere più compatto e leggero dei driver standard. Compatibile anche con l'alimentazione a batteria, è quindi utilizzabile per una gamma di applicazioni ancora più ampia rispetto al passato.

Filtra per prodotti
Scaricare
Catalogo

Manuale operativo
Software di supporto

Gamma di prodotti e informazioni correlate
Dati tecnici (generazione di calore del driver)