Motor Hands MHK Series
MHK3B-C


Actuator/Control Circuit
Questo prodotto non è più disponibile per la vendita.
| Classificazione prodotto | Nome del prodotto | Prezzo di listino | Data di spedizione |
|---|---|---|---|
| Actuator / Control Circuit | MHK3B-C | - | Prodotto fuori produzione (1.4.2015 fuori produzione) |
Incluso
- Actuator, Control Circuit, Connector, Connector Cover, Operating Manual
Specifiche
Altre Specifiche
Maximum Load Moment
The maximum load moment based on the tip of the finger. Take into consideration the mass of the load and clamping claw, the impact load during gripping, etc., and use under the maximum load moment.
[Clamping claw length] L = 80 mm or less when using clamping claw as shown in the above figure with maximum gripping force
Sensor Specifications
| Product Name | GX-H8A (Manufactured by SUNX) |
|---|---|
| Power Supply Voltage | 12~24 VDC±10 % Ripple (p-p) 10 % max. |
| Current consumption | 15 mA max. |
| Control output | NPN open-collector output 30 VDC 100 mA max. Residual voltage 1 VDC or less (at load current of 100 mA) |
| Display LED | Detection indicator (orange) |
| Logic | Normally open |
Circuit Specifications
| Product Name | MHC07B | |
|---|---|---|
| Power Supply Input | Voltage | 24 VDC±10 % |
| Current | 1.3A max. | |
| Positioning Data | Setting Mode | Absolute (absolute-position specification) method |
| Number of open/close position memories | 8 points | |
| Setting Method | Teaching or numerical input using teaching pendant | |
| Positioning Control | Number of open/close speed memories | 8 (stored as a pair with open/close position) |
| Open/close speed setting range | 100~3000 step/s (in 100 step increments) | |
| Control Mode |
|
|
| Operation Mode | Return-to-mechanical home operation, positioning operation, jog teaching, auto teaching | |
| Input Signals | Input Mode | 24 VDC Photocoupler input, Input resistance 4.7 kΩ |
| START | Positioning operation start | |
| STOP | Abort positioning operation and return-to-mechanical home operation | |
| HOME | Return-to-mechanical home operation start | |
| C_DATA 1/2/4 | Select the maximum gripping force | |
| P_DATA 1/2/4 | Select Program No. | |
| Output Signals | Output Mode | Photocoupler-connected transistor output 24 VDC 25 mA max. |
| S_POINT | Output when the present position is home (0 step). | |
| BUSY | Output when the motor is operating | |
| O.H. | Outputs when the internal temperature of the controller exceeds 80 °C. | |
| ALARM | Outputs when an abnormality occurs. | |
| Protective Function | Overheat protection, return-to-home error protection, auto-teaching error protection, finger position error protection | |
| Indicator (LED) | Power Display, Busy Display, O.H. (overheat) Display, Alarm Display | |
| Cooling Method | Natural Cooling Method | |
| Mass | 0.34 kg | |
General Specifications
Values are after rated operation at normal ambient temperature and humidity.
| Item | Motor | Controller Part |
|---|---|---|
| Insulation Resistance |
100 MΩ or more when a 500 VDC megger is applied between the following places.
|
100 MΩ or more when a 500 VDC megger is applied between the following places.
|
| Dielectric Strength |
No abnormalities observed with application for 1 minute at the following points:
|
No abnormalities observed with application for 1 minute at the following points:
|
| Operating Ambient Temperature | 0~+40 °C (non-freezing) | 0~+50 °C (non-freezing) |
| Operating Ambient Humidity | 85 % max. (Non-condensing) | |
Note
- DDo not perform insulation resistance measurements or dielectric voltage tests while the motor and speed controller are connected.
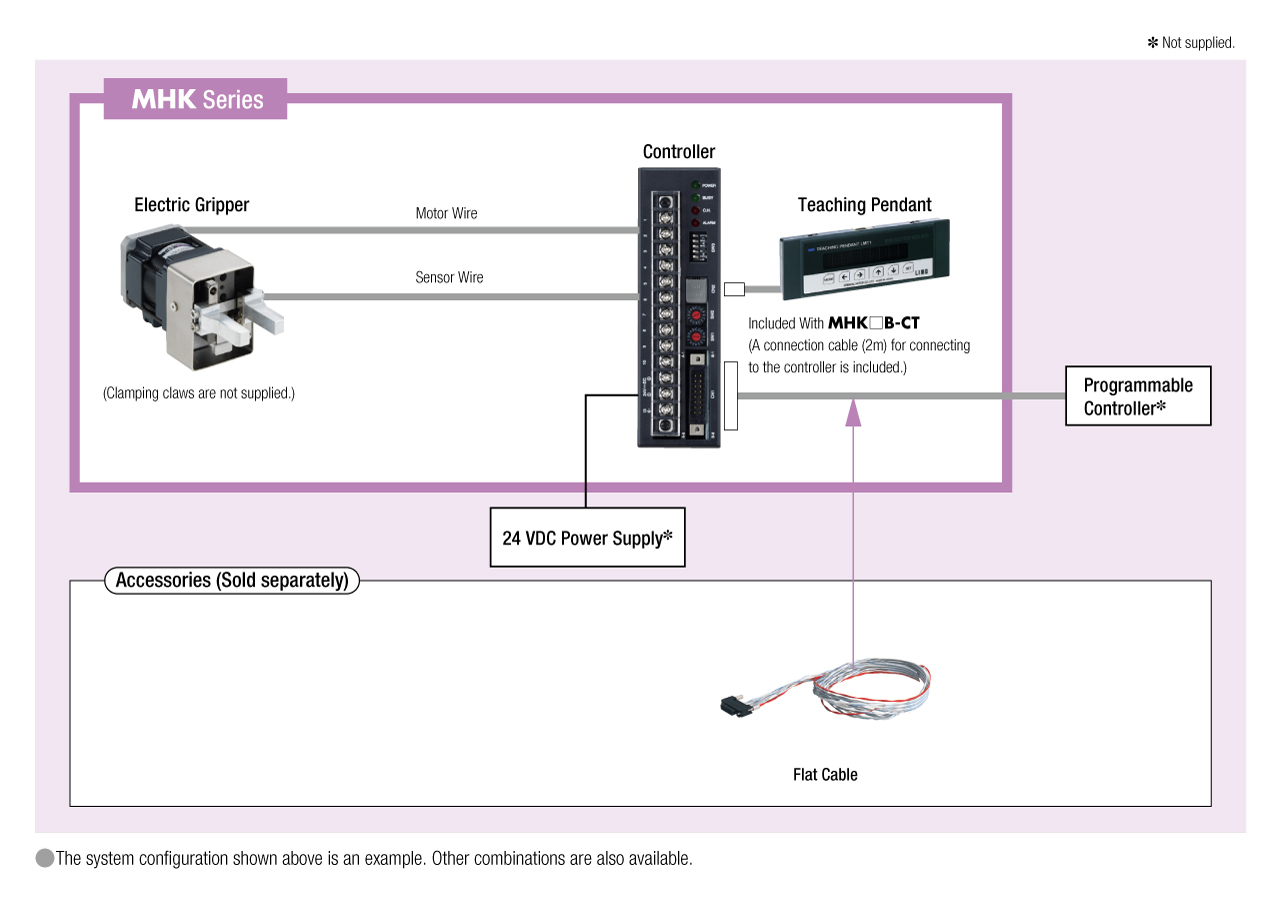
Configurazione del sistema
close