5-Phase Stepper Motors
PKP/PK Series

- High torque, low vibration
- Frame Size: 20 to 85 mm
- Geared type and type including an encoder also available
Caratteristiche |Motore passo-passo a 5 fasi Serie PKP/PK
Prestazioni migliorate
Alta precisione
Poiché l’angolo di passo della serie PKP a 5 fasi è di 0,72˚ (la versione ad alta risoluzione è di 0,36˚) e la precisione di arresto è di ±0,05˚, è possibile un posizionamento altamente preciso. Inoltre, la precisione della posizione di arresto controllata da un driver a micropassi ha quasi la stessa precisione di quella controllata da un driver a passo pieno.
La precisione di arresto non peggiora con microstep
(Driver Serie CVD a 5 fasi + motore Serie PKP a 5 fasi)


Vibrazioni ridotte
Poiché la serie PKP a 5 fasi ha un piccolo angolo di passo base di 0,72˚ (0,36˚ per la versione ad alta risoluzione), presenta vibrazioni e rumorosità inferiori rispetto ai motori passo-passo a 2 fasi con angolo di passo base di 1,8˚. Inoltre, le vibrazioni e la rumorosità possono essere ulteriormente ridotte grazie al controllo con il driver micropassi.
Esempio di caratteristiche di vibrazione del motore passo-passo a 2 fasi

Esempio di caratteristiche di vibrazione del motore passo-passo a 5 fasi

Connettore compatto e piatto
La Serie PKP utilizza un connettore compatto e piatto, che riduce la sporgenza del connettore (esclusi alcuni prodotti). Inoltre, è stata aumentata la flessibilità della direzione di uscita del cavo motore, che è rivolta verso l’alto.
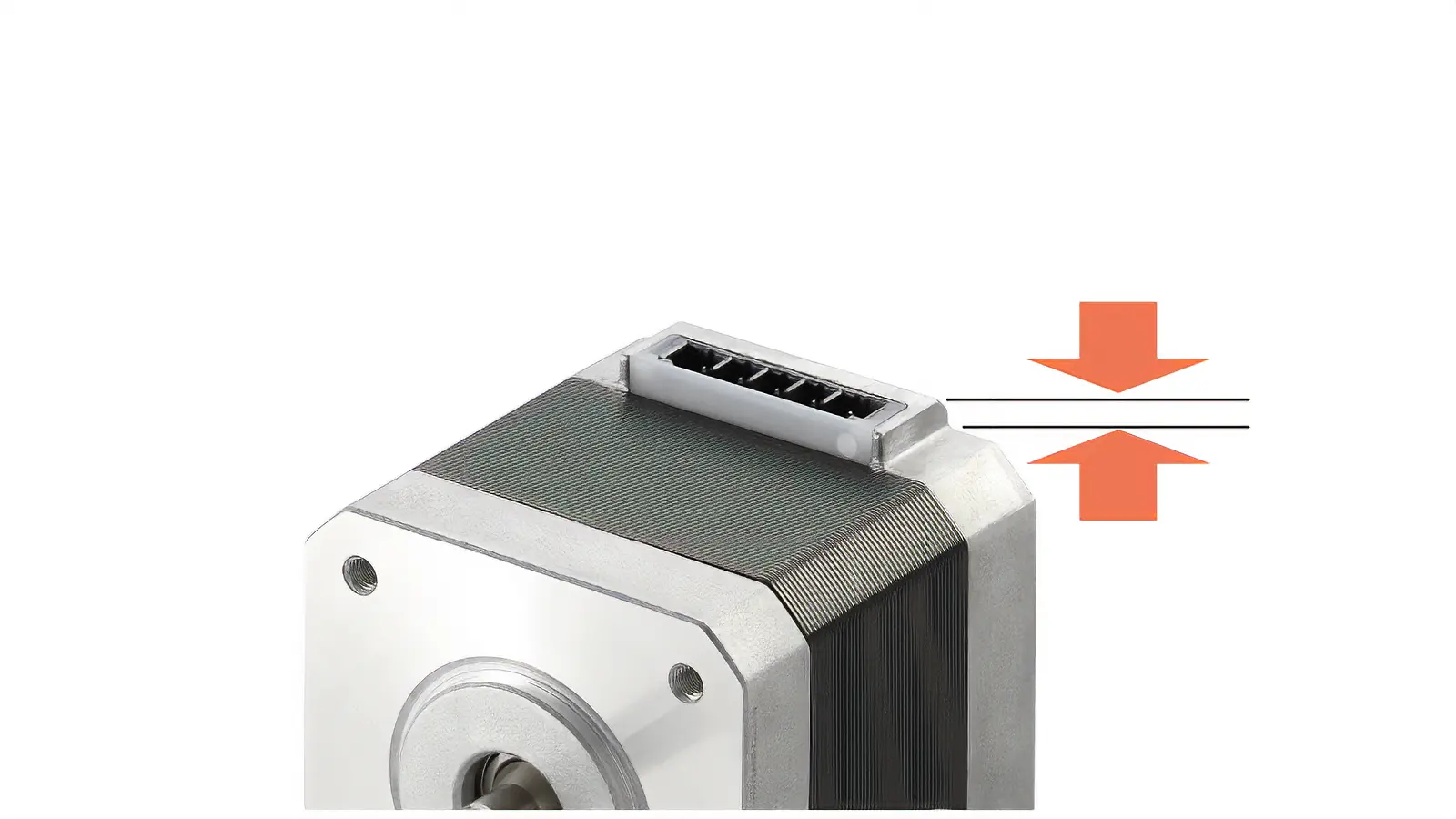
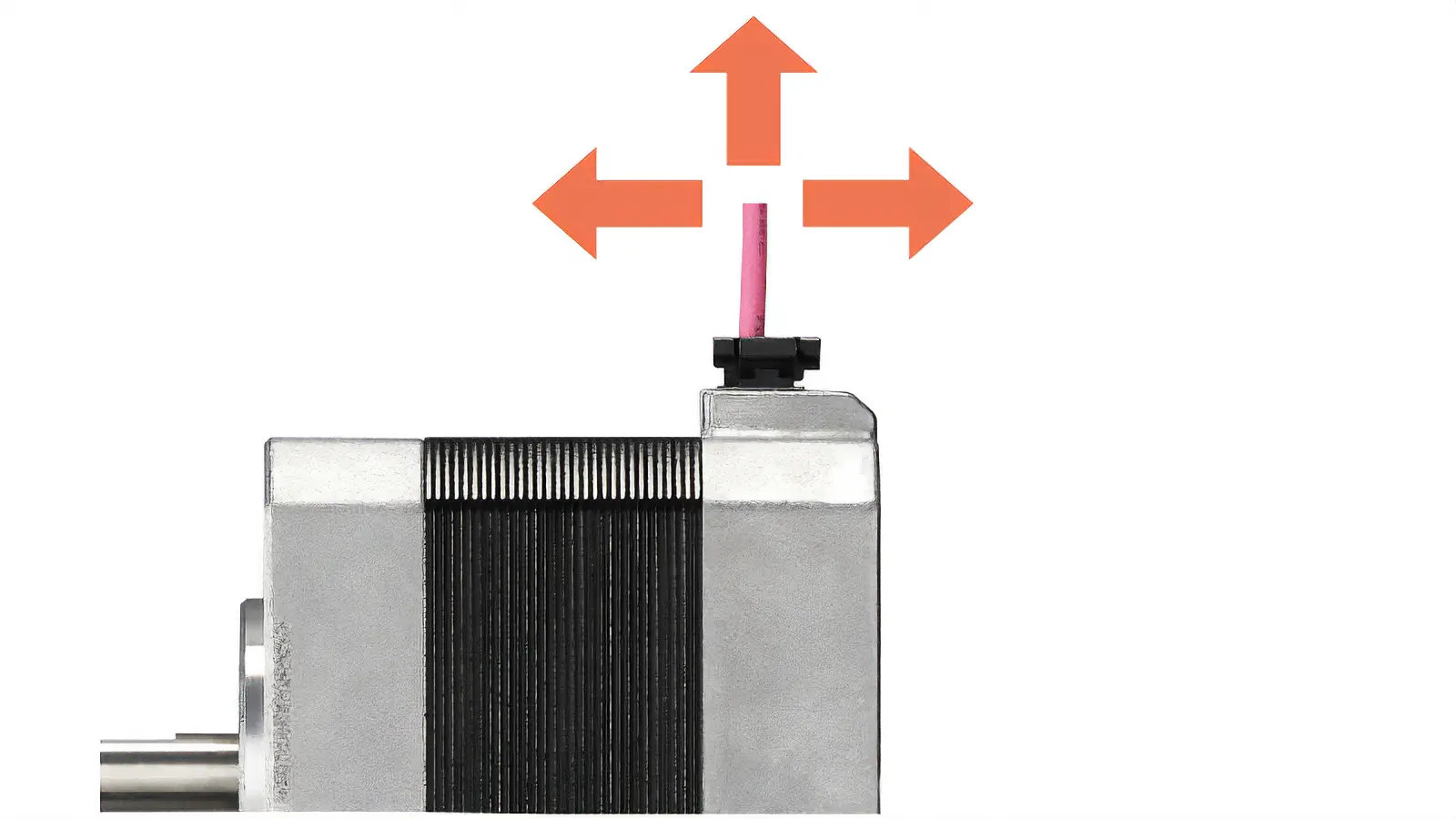
- *Per i dettagli, fare riferimento al diagramma delle dimensioni di ciascun motore.
Con encoder
Sono disponibili modelli dotati di encoder. Il confronto tra la posizione di comando e la posizione corrente consente di verificare il normale funzionamento del motore.

Specifiche principali dell’encoder
| Tipo | Versione standard |
|---|---|
| Risoluzione | 500 P/R, 1000 P/R* |
| Precisione angolare | ±0,36˚ (valore convertito all’albero di uscita del motore) |
| Segnali di uscita | Fase A, fase B, fase Z (3 canali) |
Precisione angolare
È l’errore di calcolo tra l’angolo di rotazione effettivo e l’angolo di uscita dell’encoder.

È possibile il rilevamento della posizione del motore
È possibile monitorare la posizione corrente e rilevare gli errori di posizione.
Ad esempio, il confronto tra la posizione di comando e la posizione corrente consente di verificare il normale funzionamento del motore.
Esempio di configurazione del sistema

- *Valore convertito all’albero di uscita del motore
Consente un funzionamento di homing altamente ripetibile
Poiché il segnale di fase Z viene emesso in uscita nella posizione del passo “0” (punto stabile), può sostituire il sensore homing (un sensore collegato all’albero del motore che rileva l’homing entro un giro).
Inoltre, facilita l’utilizzo congiunto del segnale di uscita della fase Z e del segnale di uscita TIM* e migliora la ripetibilità della funzione di homing.
- *È il segnale di uscita del driver ogni volta che l’albero di uscita del motore ruota di 7,2˚ (3,6˚ per le versioni ad alta risoluzione) dalla posizione homing.
Nuovo encoder (tipo magnetico)

It outputs Z-phase signals with a width of ±3.6° centered on the step "0" position (stable point).

Poiché la temporizzazione dell’uscita del segnale di fase Z non è fissa, è difficile utilizzarlo come sostituto del sensore homing ed è altrettanto difficile utilizzarlo insieme al segnale TIM.
Encoder compatto equipaggiato
Quando le dimensioni della flangia sono 56,4 mm
- *L’area arancione nel diagramma delle dimensioni è la sezione dell’encoder.

Scelta tra la versione con uscita in tensione e con uscita line driver
Sono disponibili una versione con uscita in tensione e una con uscita line driver.
È disponibile separatamente anche un comodo cavo per il cablaggio dell’encoder.
Tipi di motore
| Classificazione | Tipo | Dimensioni della flangia [mm] |
Angolo di passo base [°] |
Funzione aggiuntiva |
|---|---|---|---|---|
| Nessun riduttore |
Standard 
|
20~85 | 0,72 | Encoder |

|
42, 60 | 0,36 | Nessuno | |
| Con riduttore |
Riduttore TH 
|
28, 42, 60 | 0,024~0,2 | Nessuno |
|
Riduttore TS 
|
42, 60 | 0,024~0,2 | Nessuno | |
|
Riduttore PS 
|
22, 28, 42, 60 | 0,0144~0,18 | Nessuno | |
|
Riduttore PN 
|
28, 42, 60 | 0,0144~0,144 | Nessuno | |
|
Riduttore armonico 
|
20, 30, 42, 60 | 0,0072~0,0144 | Nessuno |
Adattatore di montaggio per attuatore lineare (venduto separatamente)

- Ottieni un movimento lineare assemblando con un motore passo-passo.
- Utilizza una vite di guida e un dado in resina resistente all’usura
- Dimensioni della flangia 30/42 mm, corsa 50~300 mm
- Spinta, forza self locking: Massimo 100 N (dimensioni della flangia: 42 mm)
Encoder rotativo (venduto separatamente)
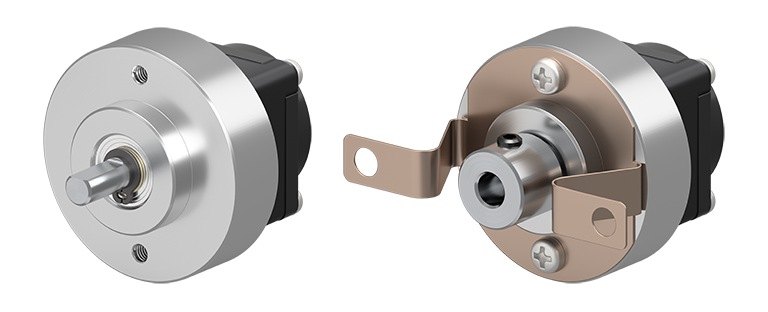
- Encoder incrementali piccoli, sottili e leggeri
- Risoluzione: 100~4000 P/R (14 modelli)
- Uscita line driver, uscita in tensione, uscita open collector
- Facile allineamento dell’homing meccanico e del segnale fase Z
Linea di prodotti
| Tipo | Angolo di passo base [°] |
Dimensioni della flangia [mm] |
Coppia massima di tenuta [N·m] |
Corrente nominale [A/Fase] |
|---|---|---|---|---|

|
0,72 | 20 | 0,0231 | 0,35 |
| 28 | 0,052~0,091 | 1,2 | ||
| 42*1 | 0,22~0,5 | 1,8 | ||
| 56,4*2 | 0,44~1,5 | 2,8 | ||
| 60 | 0,66~2,1 | 2,4~3,8 | ||
| 85 | 2,1~6,3 | 2,8 | ||

|
0,36 | 28 | 0,042~0,09 | 0,35~0,75 |
| 42 | 0,26~0,44 | 1,8 | ||
| 60 | 0,78~2,3 | 2,4 | ||

|
0,72 | 28 | 0,048~0,091 | 0,35~1,2 |
| 42 | 0,22~0,5 | 1,8 | ||
| 56,4 | 0,44~1,5 | 2,8 | ||
| 60 | 0,66~2,1 | 2,4~3,8 | ||

|
0,36 | 28 | 0,042~0,09 | 0,35~0,75 |
| 42 | 0,26~0,44 | 1,8 | ||
| 60 | 0,78~2,3 | 2,4 | ||
|
|
0,024~0,2 | 28 | 0,2~0,5 | 0,35 |
| 42 | 0,35~1,5 | 0,75 | ||
| 60 | 1,25~4 | 1,4 | ||
|
|
0,2~0,024 | 42 | 0,65~2,3 | 1,8 |
| 60 | 1,8~6 | 2,8 | ||

|
0,0144~0,18 | 22 | 0,074~0,24 | 0,35 |
| 28 | 0,2~0,4 | 0,35 | ||
| 42 | 1~3 | 0,75 | ||
| 60 | 3,5~8 | 1,4 | ||
|
|
0,0144~0,144 | 28 | 0,074~0,24 | 0,35 |
| 42 | 0,8~1,5 | 0,75 | ||
| 60 | 3,5~8 | 1,4 | ||

|
0,0072~0,0144 | 20 | 0,4~0,6 | 0,35 |
| 30 | 1,8~2,4 | 0,75 | ||
| 42 | 3,5~5 | 0,75 | ||
| 60 | 5,5~8 | 1,4 |
- *1
- La versione con mini connettore e con connettore sono disponibili in base alle differenze di caratteristiche e forme del connettore.
- *2
- Sono disponibili anche prodotti con diametro dell’albero di φ6,35 mm. Per maggiori dettagli, contattare la filiale o l’ufficio vendite Oriental Motor più vicino.
Prodotti correlati
Driver combinati (venduti separatamente)
Sono disponibili anche driver per motori passo-passo a 5 fasi.
-
Versione angolare con piastra di montaggio
Il connettore è rivolto verso l’esterno.

-
Con piastra di montaggio
Il connettore è rivolto verso l’alto.
-
Senza piastra di montaggio
Il connettore è rivolto verso l’alto.
- *La foto mostra la versione treno di impulsi. La versione con comunicazione RS-485 non è disponibile senza piastra di montaggio.
Driver per motori passo-passo a 5 fasi
Versione di controllo ad anello chiuso Serie CVD
Si tratta di driver con alimentazione DC per motori passo-passo a 5 fasi.
In combinazione con un sensore esterno, è possibile effettuare operazioni di posizionamento ad alta precisione submicronica.
Contribuisce alla costruzione di apparecchiature e progetti di apparecchiature che richiedono un controllo di maggiore precisione.

Versione CVD Serie S
Si tratta di driver con alimentazione DC per motori passo-passo a 2 e 5 fasi.
Sono disponibili driver compatti con scheda a giorno, uno per il controllo del posizionamento del motore tramite comunicazione SPI e l’altro per il controllo tramite ingresso a treno d’impulsi.

Driver per motori passo-passo a 2 fasi/5 fasi
Serie CVD versione multiasse compatibile con EtherCAT
Si tratta di driver modello a 4 assi che supportano la comunicazione EtherCAT per motori passo-passo a 2 fasi/5 fasi. Poiché i segnali di I/O possono essere cablati con un unico cavo di comunicazione, è possibile acquisire direttamente le informazioni dell’encoder senza utilizzare un controllore host, oltre a risparmiare spazio e cablaggio.

Introduzione alle combinazioni di motori passo-passo e driver

Motore passo-passo Serie PKP/Driver con ingresso a treno di impulsi Serie CVD
Aziona facilmente il motore passo-passo mediante un ingresso a treno d’impulsi. Questo è un motore e driver con ingresso treno di impulsi che soddisfa tali esigenze. Per ottenere un’elevata efficienza, una coppia elevata e basse vibrazioni, sono state raggiunte prestazioni ancora migliori.
Motore passo-passo Serie PKP/driver con comunicazione RS-485 Serie CVD
Se si desidera azionare un motore passo-passo con controllo Modbus (RTU). Impostate facilmente i dati sul touch screen. Questo prodotto combina un motore con un driver compatibile con comunicazione RS-485 per soddisfare tali esigenze. È possibile controllare fino a 31 driver collegandoli a un singolo controllore host.
Motore passo-passo a 5 fasi Serie PKP/driver con controllo ad anello chiuso Serie CVD
Il funzionamento con posizionamento ad alta precisione nell’ordine dei submicron è ottenuto grazie alla combinazione con un sensore esterno, pur mantenendo la facilità d’uso di un motore passo-passo. Contribuisce alla costruzione di apparecchiature e progetti di apparecchiature che richiedono un controllo di maggiore precisione.
Filtra per prodotti
