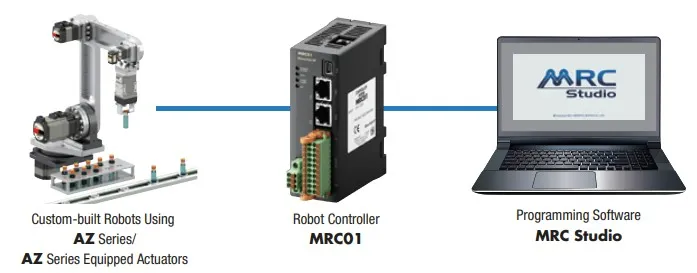
Robotersteuerung
MRC01

- Einfache Einführung und Steuerung von Robotern
- Einfache Inbetriebnahme mit Programmiersoftware
- Steuerung von Gelenkarm- und kartesischen Robotern möglich
Eigenschaften | Robotersteuerung MRC01
- Einfache Bedienung für Konstrukteure ohne Erfahrung mit Ablaufsteuerung mittels SPS
- Einfache Integration von Robotern in bestehende Systeme
- Einfache Inbetriebnahme der Robotersteuerung MRC01 mit der Parametrier-Software MRC Studio
- 2D-Visualisierung zur Automatisierung komplexerer Vorgänge
- Einrichtung mehrerer lokaler Koordinatensysteme
- MRC Studio Simulator (kostenlos) zur Überprüfung der Funktionsweise des Roboters vor dem Kauf
- Kombinierbar mit Produkten der AZ-Serie und mit der AZ-Serie ausgestatteten elektrischen Aktuatoren
Einfache Bedienung für Konstrukteure ohne Erfahrung mit Ablaufsteuerung mittels SPS
Mit dem MRC01 können Programme, die mit der Parametrier-Software MRC Studio erstellt wurden, einfach und bequem am PC erstellt und überprüft werden.
Einfache Integration von Robotern in bestehende Systeme
Der MRC01 kann über eine EtherNet/IP™ Schnittstelle mit dem Host-Controller verbunden werden. Kundenspezifische Roboter können einfach implementiert werden, ohne vorhandene Gerätesteuerungen wesentlich verändern zu müssen.
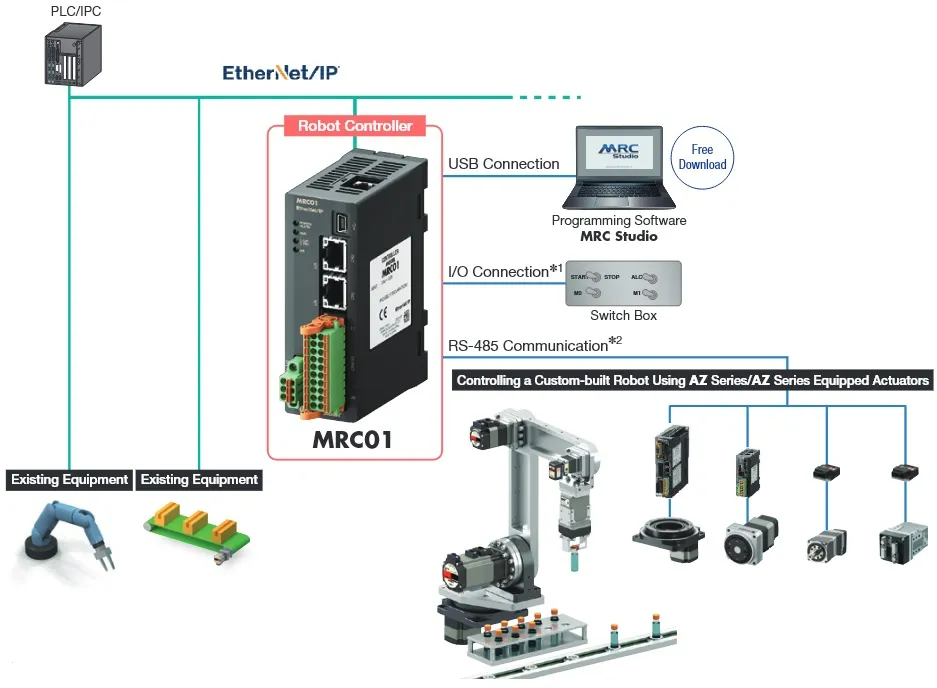
- *1
- Die Robotersteuerung MRC01 kann auch mittels I/O-Signalen (ohne Host-Controller) betrieben werden.
- *2
- Der MRC01 und die Treiber der AZ-Serie werden über RS-485-Schnittstellen verbunden.
Einfache Inbetriebnahme der Robotersteuerung MRC01 mit der Parametrier-Software MRC Studio
Die „MRC Studio Parametrier-Software“ ermöglicht die einfache Einrichtung von selbst gefertigten Robotern, von der Inbetriebnahme bis hin zur Programmierung.
Das Programm kann schon im Vorfeld ohne Verbindung mit dem Roboter mit dem „MRC Studio Simulator“ erstellt werden. Mit MRC Studio Simulator erstellte Programme können nach dem Anschluss des Roboters unverändert verwendet werden.
Beide Versionen der Software können kostenlos heruntergeladen werden.
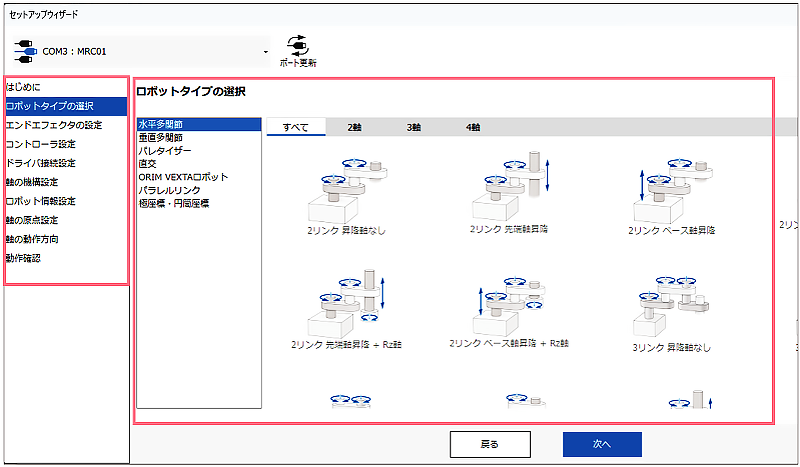
Schritt 1. Menügeführte Erstinbetriebnahme
Der Assistent bietet Unterstützung bei der Durchführung verschiedener Grundeinstellungen, wie beispielsweise der Auswahl der Roboterversion und der Eingabe von mechanischen Abmessungen. Durch Befolgen der Anweisungen und der illustrierten Anleitung können selbst unerfahrene Nutzer die Ersteinstellungen für Roboter in kurzer Zeit vornehmen.
Einrichtungsschritte
Der Wizard führt durch die verschiedenen Einrichtungsschritte.
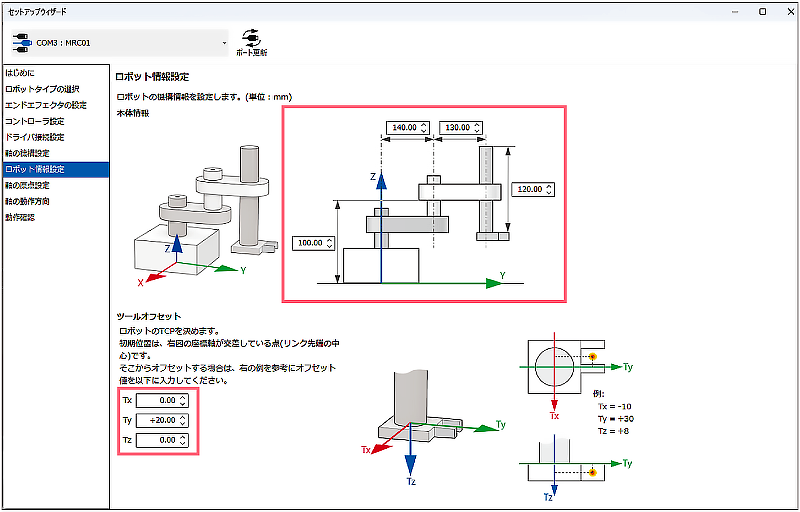
Eingabe der Armlänge und anderer Abmessungen.
Die Abmessungen werden direkt in die Eingabefelder in der Abbildung eingegeben.
Roboterversion auswählen
(Beispiele)
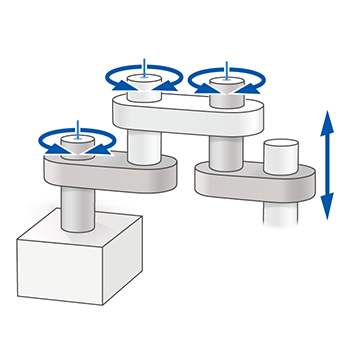
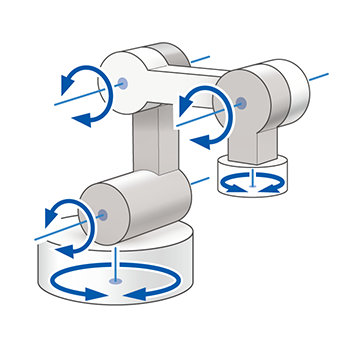
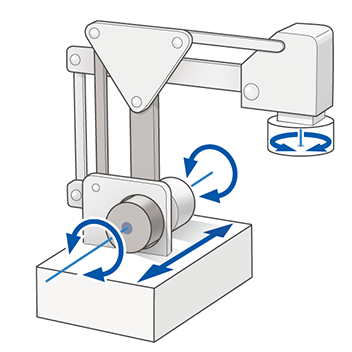
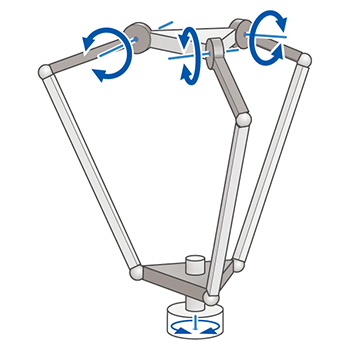
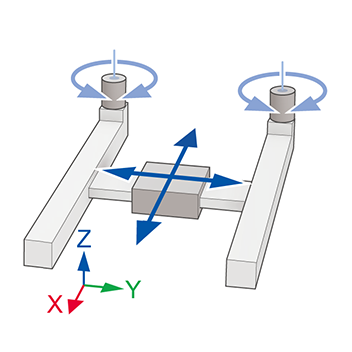
| SCARA | Knickarm | Palletierer | Delta |
|---|---|---|---|
|
|
|
|
| 3-Achsen mit Spitze auf-ab | 3-Achsen mit Rotation der Basis + Rz | 2-Achsen mit linearer Bewegung der Basis + Rz | Parallele Arme + Rz |
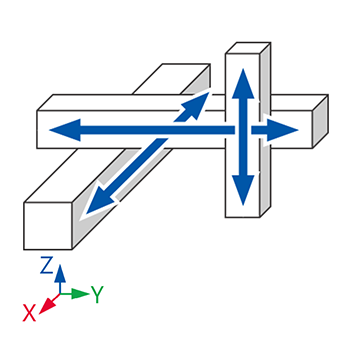
| Kartesisch | |
|---|---|
|
|
| XYZ | Flächenportal (XY) |
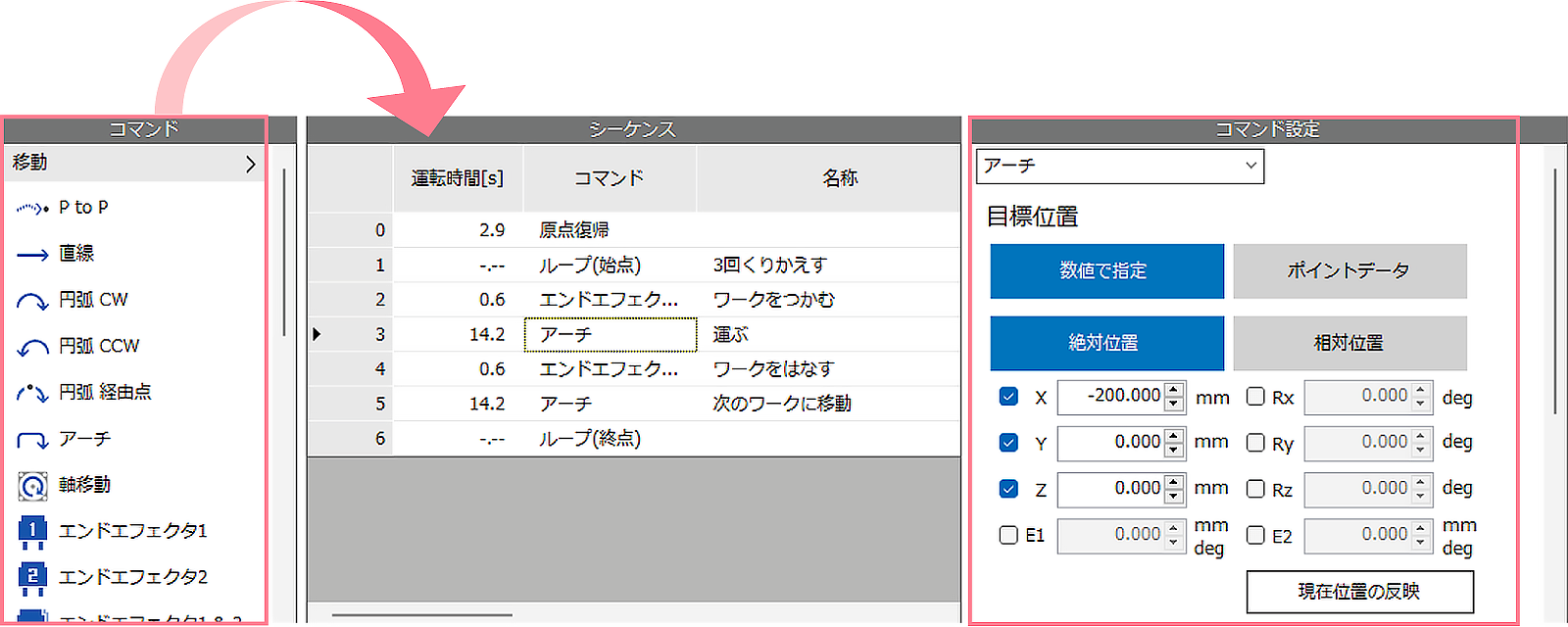
Schritt 2. Keine besonderen Programmierkenntnisse erforderlich. Einfache Programmierung durch die Auswahl von vordefinierten Elementen.
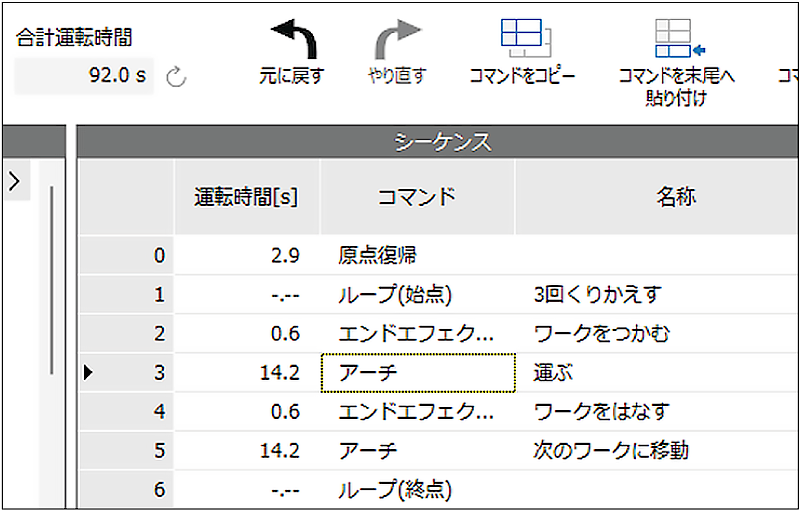
Der gewünschte Programmierschritt wird aus einer Liste von Elementen ausgewählt. Programme können intuitiv und ohne spezielle Kenntnisse, wie beispielsweise Ladder-Programme, erstellt werden. Es gibt eine Vielzahl von Funktionen, wie z. B. Punkt-zu-Punkt-Bewegung (PTP), lineare Interpolation (Linear), kreisförmige Interpolation (Circular CW/CCW) und Bogenbewegung (Arch). Darüber hinaus können Direct Operation Daten auch über EtherNet/IP vom Host-Controller aus verändert werden.
Auswahl der gewünschten Befehle mit Drag and Drop
Auswahl der gewünschten Aktion aus der Spalte „Command“ und Einfügen in die Spalte „Sequence“. In der Spalte „Command Settings“ können die Einstellungen angepasst werden.
Einstellung von Zielposition und Geschwindigkeit
Eingabe der Koordinaten der Zielposition und der Geschwindigkeit in den „Command Settings“.
| Befehl | ||||
|---|---|---|---|---|
|
|
|
|
|
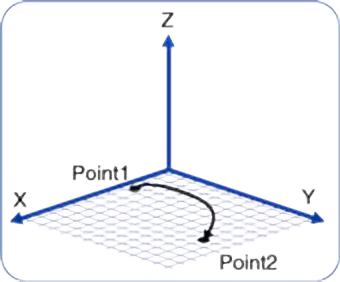
| Punkt-zu-Punkt-Bewegung (PTP) | Lineare Interpolation (Linear) | Kreisförmige Interpolation (Helikale Interpolation; Circular CW/CCW) | Bogenbewegung (Arch) | Palettierung (Pallet) |
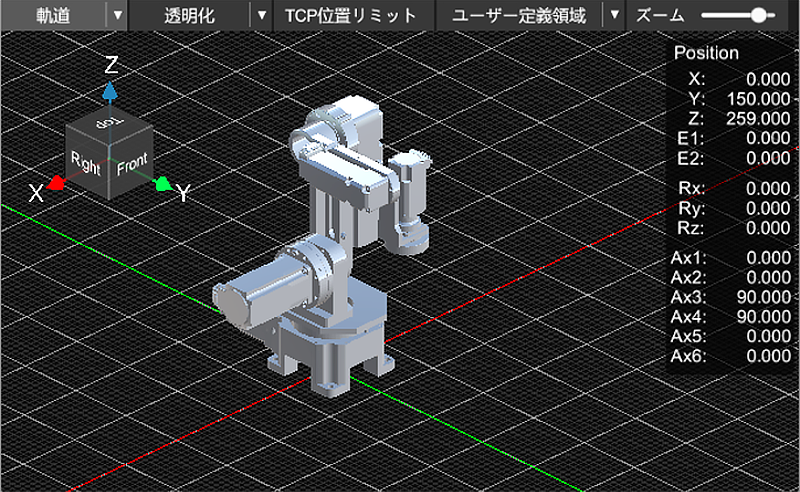
Schritt 3. Testbetrieb mit einem Online-3D-Simulator
Die Programmlaufzeit kann angezeigt und das erstellte Programm unter Berücksichtigung des Bewegungsbereichs des Roboters überprüft werden.
Es ist möglich, die Funktion auf 3D-Grafiken zu überprüfen, ohne das Gerät selbst zu bewegen.
- *Es kann Unterschiede zwischen Simulation und tatsächlichem Betrieb geben.
- *Der Testbetrieb erfordert eine Kommunikation mit MRC01.
2D-Visualisierung zur Automatisierung komplexerer Vorgänge
Entwicklung eines Roboters mit Kameraüberwachung unter Verwendung eines 2D-Bildsensors
Die Robotersteuerung MRC01 verfügt über nützliche Funktionen zur Steuerung des Roboters anhand von Informationen über die Position und den Winkel der Last, die vom Bildsensor erfasst werden.
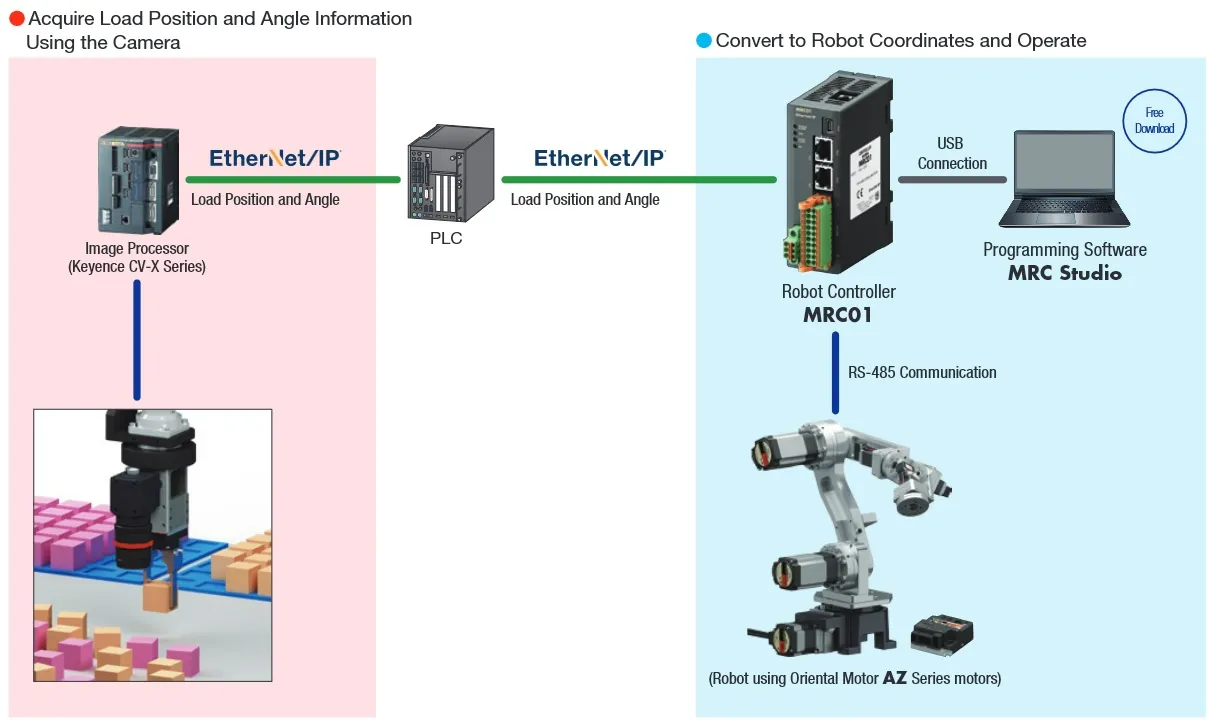
Mit einer SPS kombinierbare Bildverarbeitungssysteme
Die oben dargestellte Konfiguration veranschaulicht eine mögliche Verwendung der CV-X-Serie von KEYENCE CORPORATION.
Informationen zum Supportstatus von bildverarbeitender Software anderer Unternehmen
Kalibrierung
Um mit einer 2D-Kamera arbeiten zu können, muss sie mit Hilfe der MRC Studio Software vorkalibriert werden. Die Einstellungen können mit Hilfe der Anweisungen und Abbildungen auf dem Bildschirm vorgenommen werden. Dadurch wird der Arbeitsaufwand für Korrekturen reduziert. (Es können maximal zwei Kameras kalibriert werden.)
Kompatibilität mit Bildsensoren und Bildverarbeitungssoftware anderer Hersteller
Bildsensoren und Bildverarbeitungssoftware mit geprüfter Kompatibilität zum MRC01.
| Hersteller | Bildsensor, Verarbeitungssoftware | Beispiel für Systemkonfiguration |
|---|---|---|
| KEYENCE | XG-X | ① |
| CV-X | ||
| VS-L | ② | |
| Mitsubishi Electric | VS80 | |
| COGNEX | In-Sight 2800M | |
| In-Sight 8000 | ||
| MVtec | MERLIC | ③ |
| HALCON | ||
| CKD | Facilea |
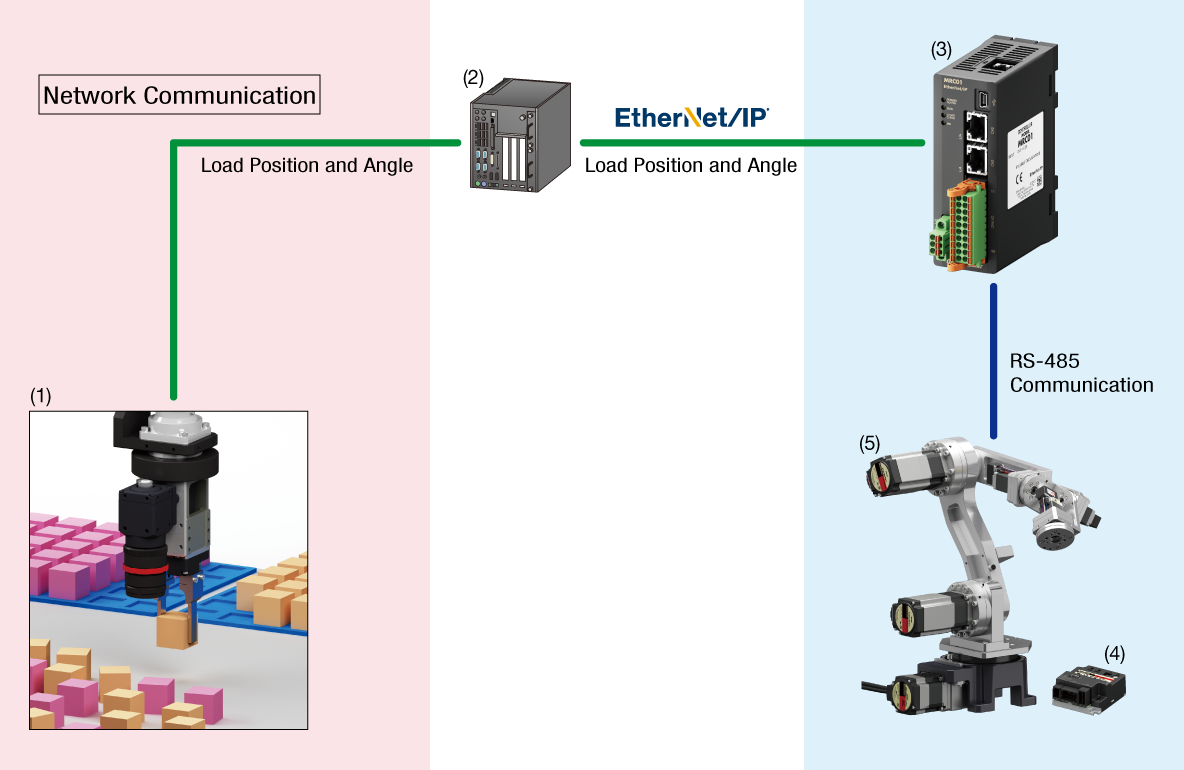
Beispiel einer Systemkonfiguration ①
Beispiel für eine allgemeine Konfiguration eines Roboters mit Bildüberwachung.
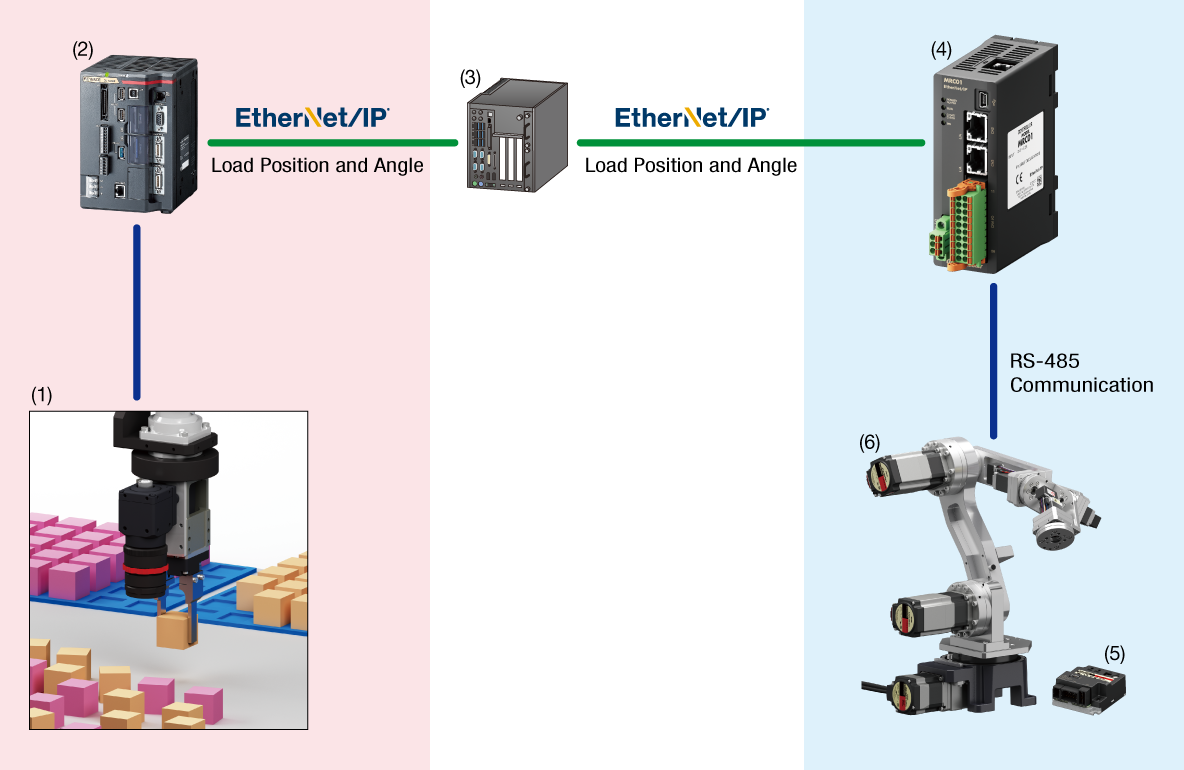
Benötigte Komponenten
- Kamera
- Kamera-Controller
- SPS
- MRC01
- Treiber
- Roboter
Beispiel einer Systemkonfiguration ②
Beispiel für eine Konfiguration, in der ein Kamera-Controller in die Kamera eingebaut ist.
Eine einfache Systemkonfiguration ist möglich.
Benötigte Komponenten
- Kamera
- SPS
- MRC01
- Treiber
- Roboter

Beispiel einer Systemkonfiguration ③
Konfigurationsbeispiel, bei dem die Kamerasteuerungs-Funktionen von einem PC (Software) ausgeführt werden.
MRC01 wird über einen PC oder eine SPS gesteuert.
Das Bildüberwachungssystem kann ohne SPS aufgebaut werden, wenn die Steuerung über einen PC erfolgt.
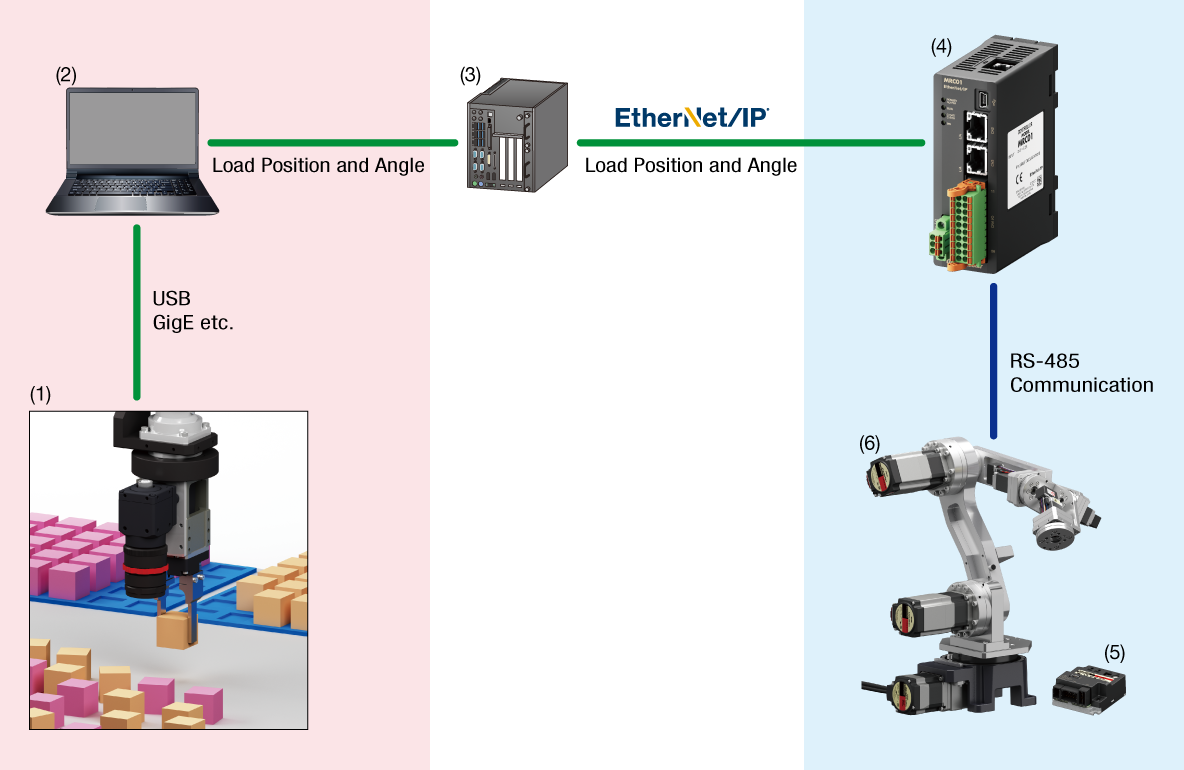
Benötigte Komponenten
- Kamera
- PC
- SPS*
- MRC01
- Treiber
- Roboter
- * Bei Bedarf.

Anwendungsbeispiele
In Verbindung mit einer 2D-Kamera lassen sich zahlreiche Automatisierungen realisieren, beispielsweise die Erkennung von Ladepositionsinformationen, Maß- und Sichtprüfungen usw. Hier ein Beispiel.
Positionskorrektur
Ausrichtung ungeordneter Bauteile (Methode mit fester Kamera)
Farberkennung
Sortieren von Bauteilen unterschiedlicher Farben (Hand-Eye–Methode)

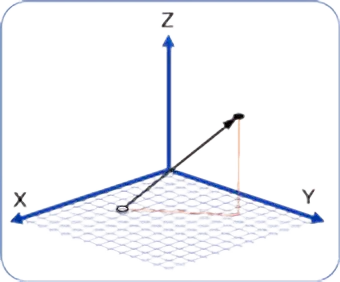
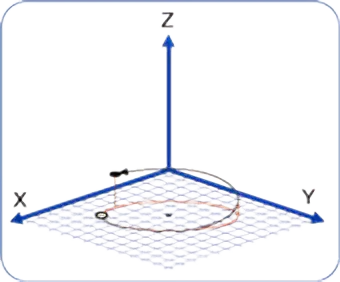
Einrichtung mehrerer lokaler Koordinatensysteme
Dies ist nützlich, wenn identische Bewegungen in mehreren Arbeitsbereichen ausgeführt wird. Es ist möglich, den Startpunkt des Arbeitsbereichs zu ändern, ohne das Programm zu modifizieren.
Das Koordinatensystem wird im Teaching Menü festgelegt
Es können bis zu drei beliebige Positionen als Referenzpunkt festgelegt werden. Die Einstellungen werden über das Teaching Menü im MRC Studio vorgenommen.
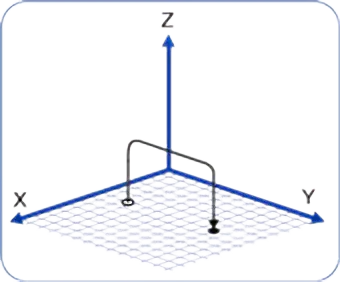
-
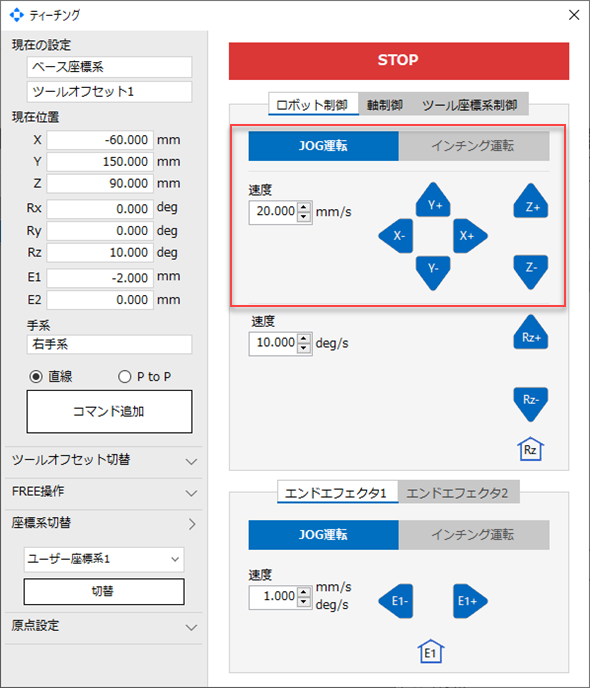
Den Roboter in die Position bewegen, die als Referenzpunkt hinterlegt werden soll. -
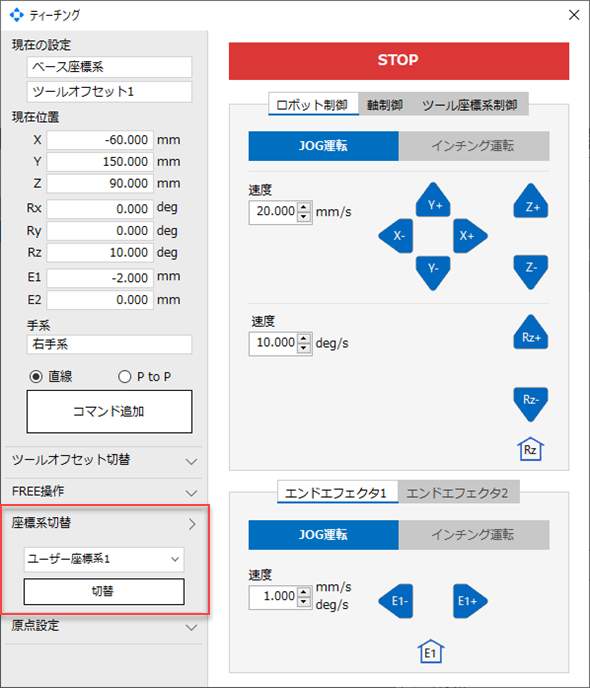
Auswahl des Koordinatensystems -
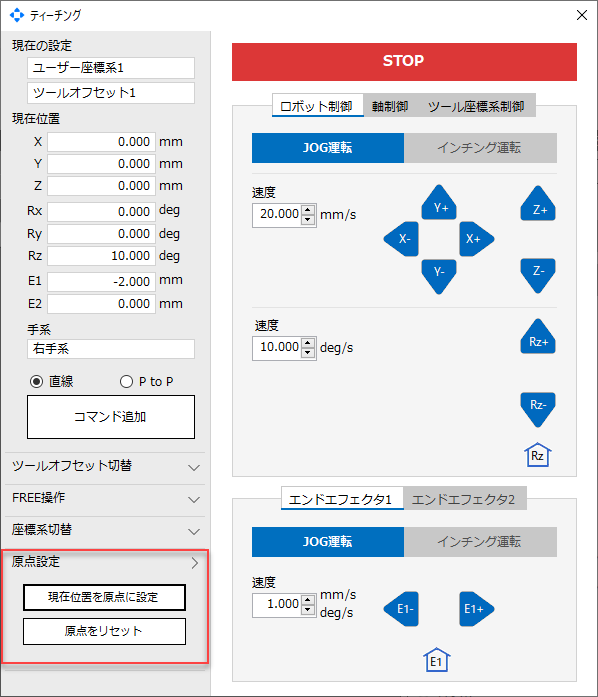
Festlegen der aktuellen Position als Referenzpunkt
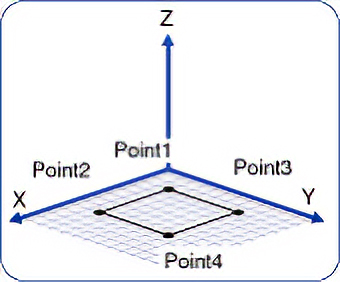
Einfacher Wechsel innerhalb eines Programms
Das Koordinatensystem kann auch mit dem Befehl „Changing coordinate system“ im Programm geändert werden. Es ist möglich, das Koordinatensystem mehrmals im Programm zu wechseln.
Mit dem MRC Studio Simulator kann die Funktionsweise des Roboters vor dem Kauf überprüft werden.
Der MRC Studio Simulator ist eine Software, die die Simulation tatsächlicher Bewegungen ohne den Roboter selbst oder MRC01 ermöglicht.
Mit dem MRC Studio Simulator erstellte Programme können bei der Installation tatsächlicher Roboter unverändert verwendet werden.

Unterschiede zwischen MRC Studio Simulator und MRC Studio (Vollversion)
Beide stehen zum kostenlosen Download zur Verfügung. Unterschiede in der Funktionalität:
| Element | MRC Studio Simulator | MRC Studio (Vollversion) |
|---|---|---|
| Kommunikation mit der Robotersteuerung MRC01 | - | ○ |
| Setup | △ | ○ |
| Die Parametereinstellungen werden nur simuliert. | ||
| Speichern von Konfigurationsdateien | ○ | ○ |
| Dateiformat | ○ | ○ |
| .mrcxt-Dateien Beispieldateien sind verfügbar. |
.mrcx-Dateien | |
| Importieren von mit dem MRC Studio Simulator erstellten Dateien | - | ○* |
| Teaching | ○ | ○ |
| Erstellen eines Programms | ○ | ○ |
| Testbetrieb | ○ | ○ |
| Parameter-Einstellungen | △ | ○ |
| Einige Parameter können nicht eingestellt werden. Weitere Informationen siehe [Help] → [Open how to use] im MRC Studio Simulator. |
||
| Überwachung | △ | ○ |
Beispiele:
I/O-Signale können ohne externe Beschaltung nicht überwacht werden. |
- * Der MRC Studio Simulator berücksichtigt die Belastung der einzelnen Achsen nicht, was zu Unterschieden im tatsächlichen Betrieb führen kann.
Bei der ersten Inbetriebnahme ist eine reduzierte Geschwindigkeit empfehlenswert.
Geeignete Produkte
Kombinierbar mit den Produkten der AZ-Serie und den mit der AZ-Serie ausgestatteten elektrischen Aktuatoren.
AZ-Serie

Elektrische Aktuatoren

Rotierende Aktuatoren mit Hohlwelle
DGII-Serie

Kompakte Elektrozylinder
DR-Serie

Kompakte Elektrozylinder
DRS2-Serie



Elektrische Linearführungen der EZS-Serie
Für Reinraumanwendungen

Produkte eingrenzen

