Elektrische Hubsäulen
EL-Serie
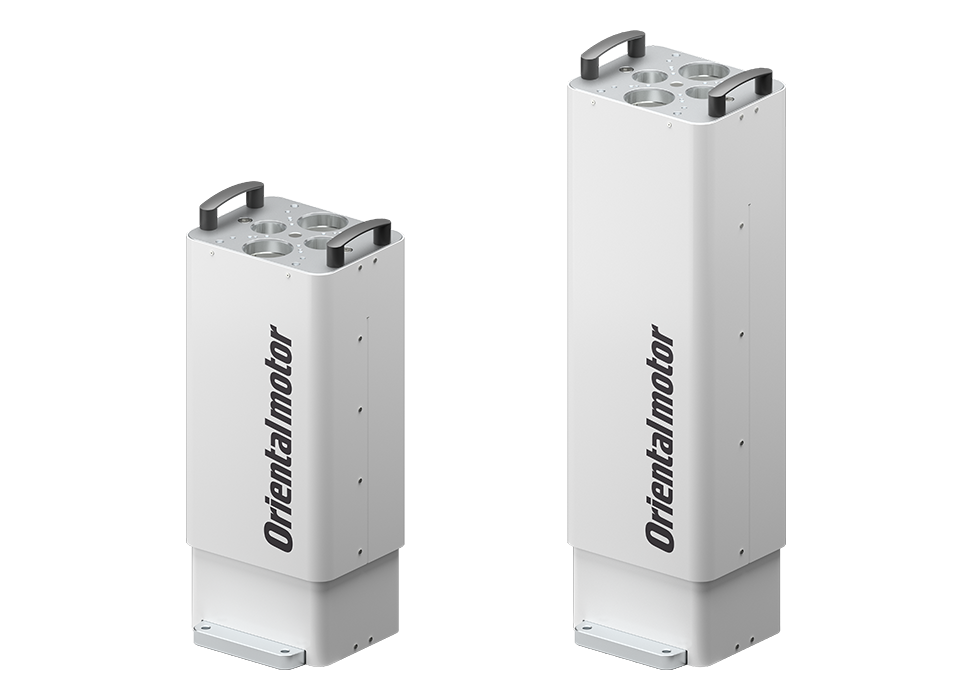
- Für die Erweiterung des vertikalen Arbeitsbereichs
- Reduzierter Zeitaufwand für Konstruktion, Montage und Inbetriebnahme
- Hohe Steifigkeit und hohe Genauigkeit
- Hub 50/100/200/300 mm
- Ausgestattet mit Motoren der AZ-Serie mit batterielosem Absolutencoder
Eigenschaften | Elektrische Hubsäulen der EL-Serie
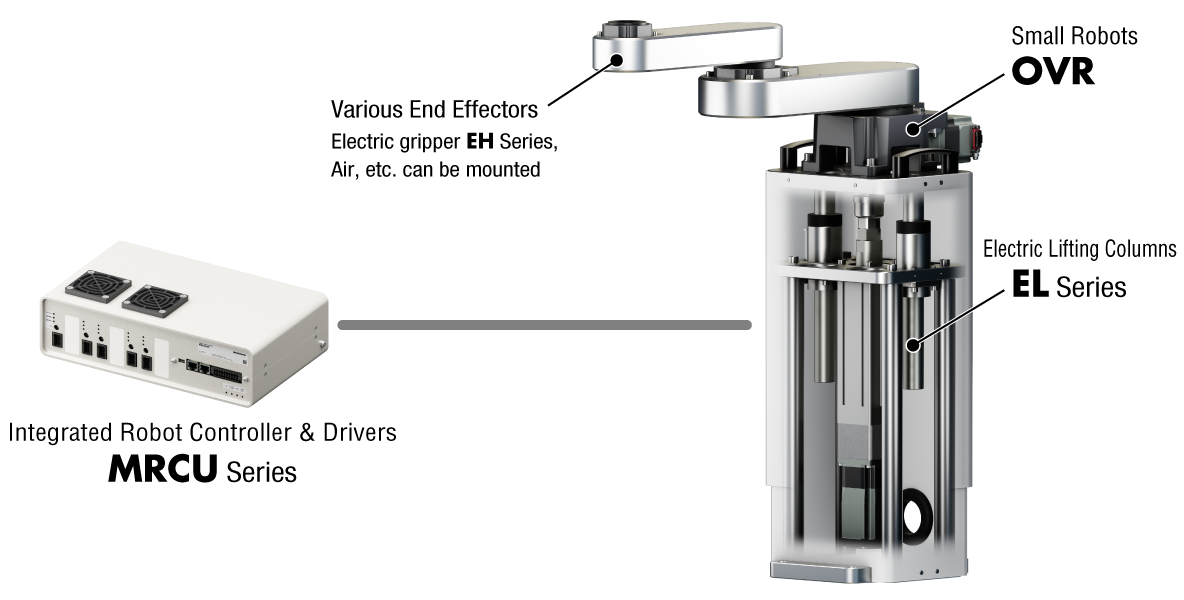
Einfach mit OVR Kleinrobotern kombinierbar, um den vertikalen Arbeitsbereich der Roboter zu erweitern
Elektrische Hubsäulen der EL-Serie können mit Robotern kombiniert werden, um den vertikalen Arbeitsbereich zu erweitern. Sie zeichnen sich durch hohe Steifigkeit und hohe Genauigkeit aus. Der Hub ist wählbar zwischen 50 bis 300 mm. Trägt zur Reduzierung des Zeitaufwands für die Konstruktion, Montage und Inbetriebnahme von Anlagen bei.
Reduzierter Zeitaufwand für Konstruktion, Montage und Inbetriebnahme
Applikationen, z. B. Roboter, können direkt am beweglichen Teil der Hubsäule befestigt werden. Externe Führungen werden nicht benötigt. Dies führt zu einer verkürzten Inbetriebnahmezeit.


Beispiele für die Verwendung der elektrischen Hubsäulen der EL-Serie.
Elektrische Hubsäulen der EL-Serie
OVR 3-Achs SCARA-Roboter + Elektrische Hubsäule der EL-Serie + Elektrische Greifer der EH-Serie
Kombinierbare Kleinroboter
Interner Kabelspeicher
In der Säule ist ausreichend Platz für Kabel. Durch die Öffnung im beweglichen Teil der Säule können z. B. Roboterkabel gebündelt und durch das Innere der elektrischen Hubsäule geführt werden.


Eine Robotersteuerung kann bis zu 6 Roboterachsen und 2 Zubehörachsen steuern
Die integrierte Robotersteuerung MRCU mit der Robotersteuerung MRC01 und Treibern der AZ-Serie kann bis zu 6 Roboterachsen und 2 Zubehörachsen steuern.
Eine Kombination aus OVR Kleinroboter, elektrischem Greifer der EH-Serie und elektrischer Hubsäule der EL-Serie kann mit einer Robotersteuerung gesteuert werden. Zusätzlich können 3-Achs SCARA-Roboter mit einer Hubachse erweitert werden. Die Robotersteuerung steuert in diesem Fall einen 4-Achs Roboter inklusive der elektrischen Hubsäule als vierte Achse und bis zu zwei Zubehörachsen.
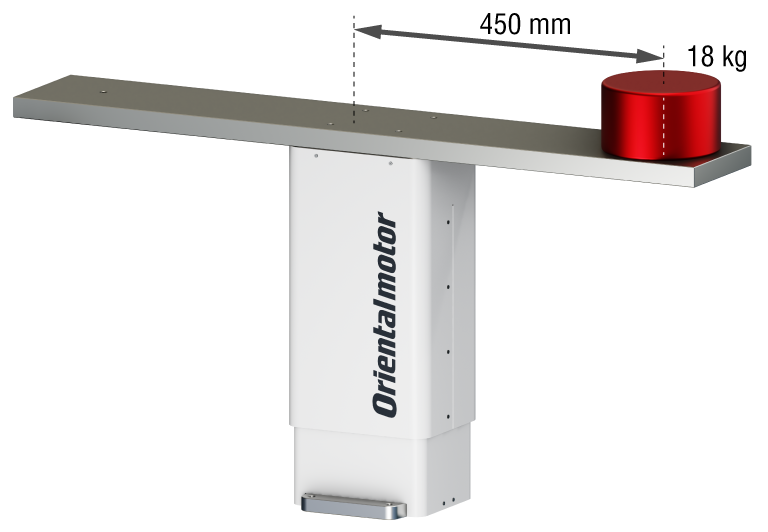
Hohe Steifigkeit, hohe Genauigkeit und hohes Kippmoment durch Linearkugellager
Die Linearkugellager realisieren ein hohes zulässiges Lastmoment. Mit einem zulässigen Kippmoment von 80 Nm sind die Hubsäulen ideal geeignet für die Verwendung mit SCARA-Robotern.

Große Lasten schnell heben und senken
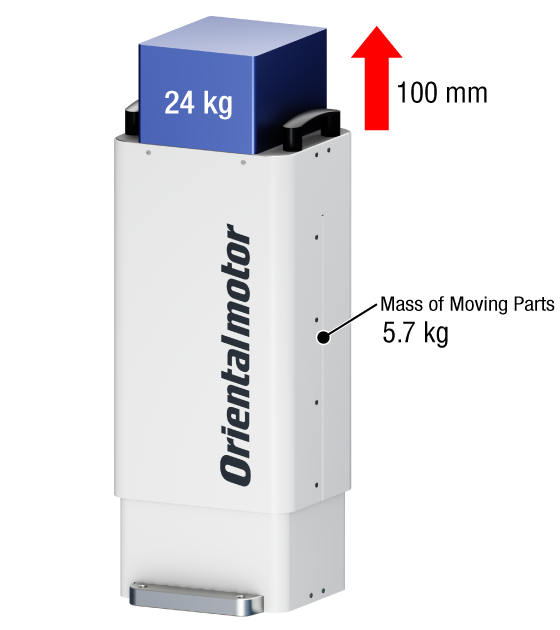
Anwendungsbeispiel
- Traglast (gesamt): 29,7 kg (5,7 kg bewegliche Teile + 24 kg Last)
- Verfahrweg: 100 mm
Verwendetes Produkt
- Produktname: EL610AZMK
- Spindelsteigung: 6 mm
- Stromversorgung: 24 VDC
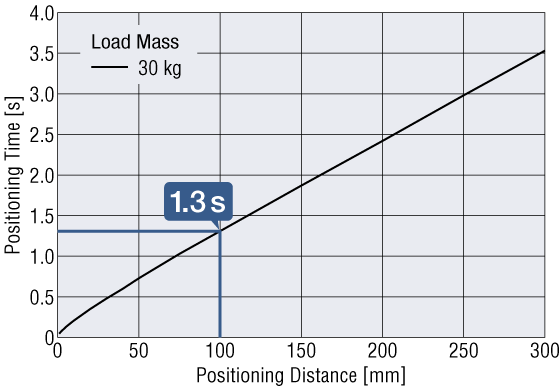
Die minimale Positionierzeit lässt sich leicht berechnen
Für die elektrischen Aktuatoren von Oriental Motor steht ein Support-Tool zur Verfügung, um die Positionierzeit gemäß dem verwendeten Modell und den Betriebsbedingungen zu berechnen.
- * Auswahl des verwendeten Aktuators (elektrischer Zylinder der EAC-Serie).
- * Die tatsächliche Transportlast berechnet sich aus dem Gewicht der Last und des beweglichen Teils der Hubsäule.
Beliebige Einbausituation
Boden- oder Deckenmontage sind möglich und erweitern den Einsatzbereich.

Vorteile der verwendeten AZ-Serie
Ausgestattet mit batterielosem Absolutencoder
Der Motor ist mit einem kleinen batteriefreien mechanischen Absolutencoder (ABZO-Sensor) ausgestattet. Dies kann dazu beitragen, die Produktivität zu steigern und die Kosten zu senken.
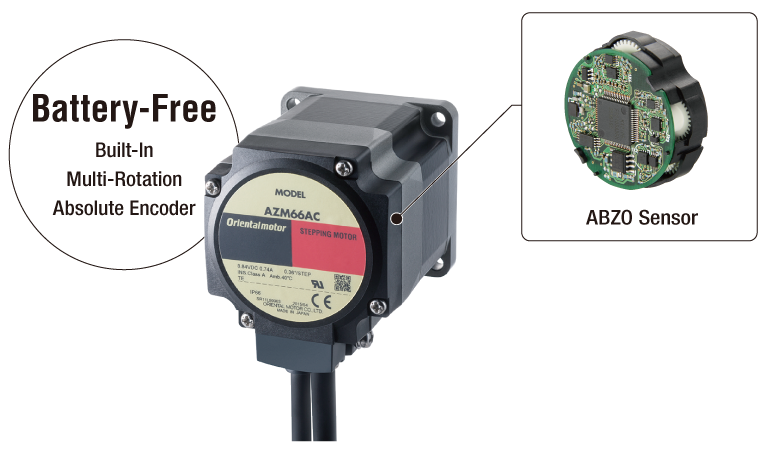
- Mechanischer Encoder
Selbst wenn während des Betriebs die Stromversorgung unterbrochen wird, bleiben die Positionsinformationen erhalten. - Multiturn-Absolutencoder
Die Erkennung der Absolutposition ist im Bereich von ±900 Umdrehungen (1.800 Umdrehungen) der Motorwelle möglich.
Externe Sensoren sind nicht erforderlich
Da es sich um ein Absolutsystem handelt, sind Referenzsensoren oder Endschalter nicht erforderlich.
Vorteile
- Verbesserte schnelle Rückfahrt zum Referenzpunkt und Referenziergenauigkeit
- Reduzierte Kosten
- Einfache Verdrahtung
- Keine Beeinträchtigung durch externe Sensorfehlfunktionen
Batterielos
Mechanische Sensoren benötigen keine Batterien.
Die Positionsinformationen werden mechanisch vom ABZO-Sensor verwaltet.
Vorteile
- Batterien müssen nicht ausgetauscht werden
- Flexible Treiberinstallation
- Sicherheit bei weltweiten Lieferungen
Die Sequenzfunktion vereinfacht die Programmierung
Die Positioniervorgänge der AZ-Serie verfügen über eine Vielzahl von Ablauffunktionen, wie z. B. die Einstellung eines Timers zwischen den Vorgängen und Linked Operation, die bedingte Verzweigung und die Loop-Funktion.
Diese Funktionen können mit der Parametrier-Software MEXE02 eingestellt werden, was das Programm der übergeordneten Steuerung vereinfacht.
- Einstellung der Fahrsatzdaten (max. 256)
- I/O-Signale (6 Eingänge, 6 Ausgänge)
- Remote I/O-Signale (16 Eingangbits, 16 Ausgangsbits)
Produktübersicht der mit AZ-Motoren ausgestatteten Serien
Die Verwendung einheitlicher Motoren und Treiber vereinfacht die Verdrahtung, Steuerung und Ersatzteilhaltung.
Mit der AZ-Serie ausgestattete elektrische Aktuatoren
| Elektrische Linearführungen | Elektrische Zylinder | Kompakte Elektrozylinder | Zahnstangensysteme | Elektrische Greifer | Rotierende Aktuatoren mit Hohlwelle | Elektrische Hubsäulen |
|---|---|---|---|---|---|---|
| EAS-Serie EZS-Serie |
EAC-Serie | DR-Serie DRS2-Serie |
L-Serie | EH-Serie | DGII-Serie | EL-Serie |
- Die Aktuatoren sind für unterschiedliche Stromversorgungen verfügbar. Die detaillierte Produktübersicht finden Sie auf der jeweiligen Seite der Serie.
Treiberversionen
Verfügbare Treiber
Es sind Produkte für eine Vielzahl von Schnittstellen erhältlich.
| Schnittstelle | Treiberversion | ||
|---|---|---|---|
Einzelachs-Treiber

|
mini-Treiber

|
||
|
|
Mit EtherCAT-Schnittstelle | Mit EtherCAT-Schnittstelle | |
|
|
Mit EtherNet/IP-Schnittstelle | Mit EtherNet/IP-Schnittstelle | |
|
|
Mit PROFINET-Schnittstelle | Mit PROFINET-Schnittstelle | |
| Modbus (TCP, UDP) | - | Ethernet-Schnittstelle | |
| - | Mit Ethernet-Schnittstelle | ||
|
|
- | Mit RS-485-Schnittstelle* | |
|
|
- | - | |
|
|
Mit integriertem Controller* | Mit RS-485-Schnittstelle* | |
| Modbus (RTU) | Mit integriertem Controller | Mit RS-485-Schnittstelle | |
| I/O | Mit integriertem Controller | - | |
| Takteingang | Mit Takteingang und RS-485-Schnittstelle Mit Takteingang |
Mit Takteingang und RS-485-Schnittstelle | |
- * Bei der Steuerung eines integrierten Controllers oder einer RS-485-Schnittstelle mit CC-Link oder MECHATROLINK ist ein separat erhältlicher Netzwerkkonverter (Gateway) erforderlich.
Einfacher Betrieb über PC mit der Parametrier-Software MEXE02
Mit der Parametrier-Software MEXE02 können Fahrsatzdaten und verschiedene Parameter eingestellt, Positionen geteacht und Antriebe überwacht werden.
Hier klicken, um die Parametrier-Software herunterzuladen
Umfassende Unterstützung durch eine Vielzahl von Funktionen der Software vom Start bis zur Wartung
-
Inbetriebnahme und Test
Nützliche Funktionen für die Verdrahtungsprüfung und eine Testfunktion sind vorhanden.
- Einstellen und Speichern von Fahrsatzdaten
- I/O-Test
- Teaching, Remote Operation
-
Optimierung
Die folgenden Funktionen helfen bei der Optimierung der Fahrsatzdaten nach der Inbetriebnahme des Antriebs.
- Waveform Monitor
-
Diagnose und Wartung
Diagnose- und Wartungsfunktionen stehen für die Fehlerdiagnose und Wartung während des Betriebs zur Verfügung.
- Alarm Monitor
- Unit Information Monitor
- Status Monitor
-
„Operation Data/Parameter Setting“ Monitor -
Waveform Monitor
Hier klicken, um Details zu Funktionen der Parametrier-Software zu erhalten
Detaillierte Produktinformationen
Hier klicken für detaillierte Produktinformationen wie Spezifikationen, Eigenschaften, Abmessungen, CAD, Bedienungsanleitungen usw.
| Steigung (mm) | Hub (mm) | Produktname |
|---|---|---|
| 12 | 50 | EL1205AZMK |
| 100 | EL1210AZMK | |
| 200 | EL1220AZMK | |
| 300 | EL1230AZMK | |
| 6 | 50 | EL605AZMK |
| 100 | EL610AZMK | |
| 200 | EL620AZMK | |
| 300 | EL630AZMK |
Nutzen Sie den kostenlosen Antriebsauslegungs-Service. Nach Angabe der wichtigsten Parameter berechnet unsere technische Abteilung Ihnen das für die Anwendung passende Produkt.
Verwandte Produkte: OVR Kleinroboter
Einfacher, kompakter, leichter Industrieroboter, bestehend aus Motoren der αSTEP AZ-Serie mit batterielosem integrierten Absolutencoder.
Durch die intuitive Programmierung der Robotersteuerung MRC01 lassen sich Anwendungen mit mehrachsigen Robotern problemlos realisieren.
Einige Motoren können vom Kunden ausgetauscht werden, was die Wartungskosten reduziert.
- ● Für die Ansteuerung des Roboters wird eine Robotersteuerung MRC01 und Treiber entsprechend der Anzahl der Roboterachsen benötigt.

3-Achs-SCARA-Roboter
Maximale Transportlast: 10 kg
Maximale Reichweite: 410 mm, 460 mm oder 700 mm
- Flacher SCARA-Roboter für den Einsatz in niedrigen Räumen
- Gewicht: 7,6-8,9 kg

4-Achs-Knickarmroboter
Maximale Transportlast: 5 kg
Maximale Reichweite (horizontal): 480 mm, 680 mm oder 880 mm
- Stabiler horizontaler Transport
- Gewicht: 16,5 kg, 17,4 kg, 26,9 kg