Kleinroboter OVR
3-Achs SCARA Roboter

- Leicht und flach, Gewicht ab 7,6 kg, Höhe ab 137 mm
- Ideal für niedrige Räume
- Dritter Arm kann kundenseitig frei gestaltet werden
- Max. Reichweite 410 mm/460 mm/700 mm, max. Transportlast 3-10 kg
- Verwendung der AZ-Serie mit integriertem, batterielosem Absolutencoder (für DC-Stromversorgung)
Eigenschaften | 3-Achs SCARA-Roboter
- Flacher SCARA-Roboter
- Produktübersicht der zur Auswahl stehenden Roboter
- Kundenseitig anpassbares Design
- Eigenständige Wartung ist möglich
- Einfach zu programmierende Robotersteuerung
- Verwendung der AZ-Serie mit integriertem, batterielosem Absolutencoder
- Nützliche Software für die Inbetriebnahme der Roboter
- Nähere Informationen zum Produkt
- Einfache Implementierung von Robotern in bestehende Systeme
- Montagewinkel für 3-Achs SCARA
- Verwandte Produkte
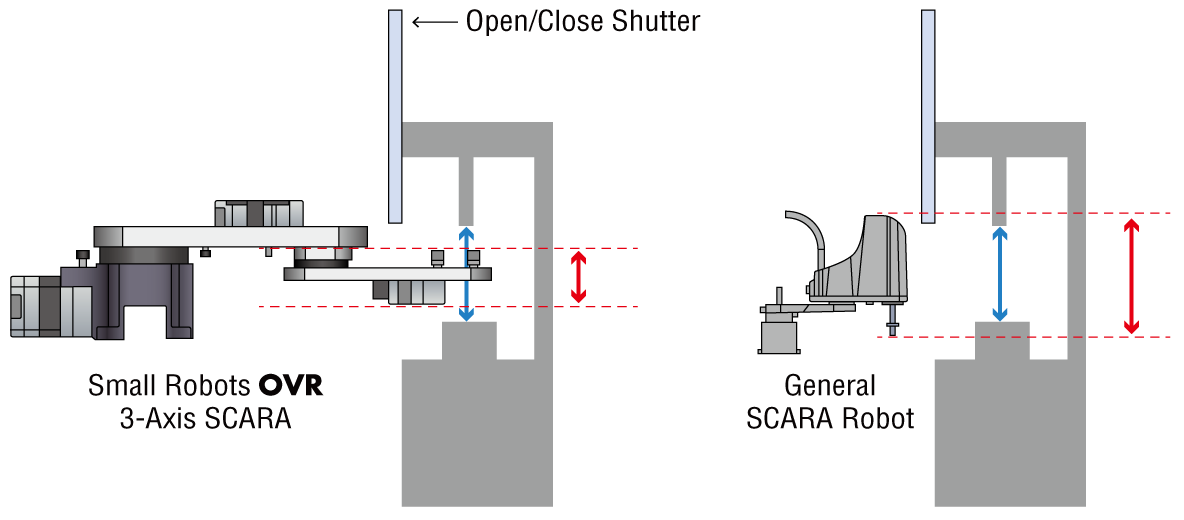
Flacher SCARA-Roboter
Im Vergleich zu herkömmlichen SCARA-Robotern ermöglicht das flache Design dem Roboter die Arbeit in niedrigen Räumen, beispielsweise zum Anbringen und Entfernen von Teilen an und von Geräten.
Erweiterter Einsatzbereich durch die Kombination mit den elektrischen Hubsäulen der EL-Serie.
- Der vertikale Arbeitsbereich kann leicht erweitert werden, indem der Roboter angehoben und abgesenkt wird.
- Die Höhe der Roboterspitze kann gering gehalten werden, sodass der Roboter auch in niedrige Räume passt.
- Eine externe Führung oder andere Bauteile sind nicht notwendig, wodurch die Inbetriebnahmezeit der Anlage verkürzt wird.
Produktübersicht der zur Auswahl stehenden Roboter
Neben der Standardversion der SCARA-Roboter sind auch omnidirektionale SCARA-Roboter verfügbar.
Die neuen SCARA-Roboter bieten höhere Transportlasten und längere Reichweiten.
Eigenschaften und Versionen
| Produktname | OVR3041K3-H | NEUOVR3046K10-H | NEUOVR3070K3-H | |
|---|---|---|---|---|
| Ansicht |
|

|

|
|
| Eigenschaften | ・Flach und leicht ・Preiswert |
・Für große Transportlasten ・Omnidirektionale Bewegung für eine verkürzte Taktzeit ・Einfache staubgeschützte Konstruktion |
・Große Reichweite ・Omnidirektionale Bewegung für eine verkürzte Taktzeit ・Einfache staubgeschützte Konstruktion |
|
| Maximale Reichweite | 410 mm | 460 mm | 700 mm | |
| Maximale Transportlast | 3 kg | 10 kg | 3 kg | |
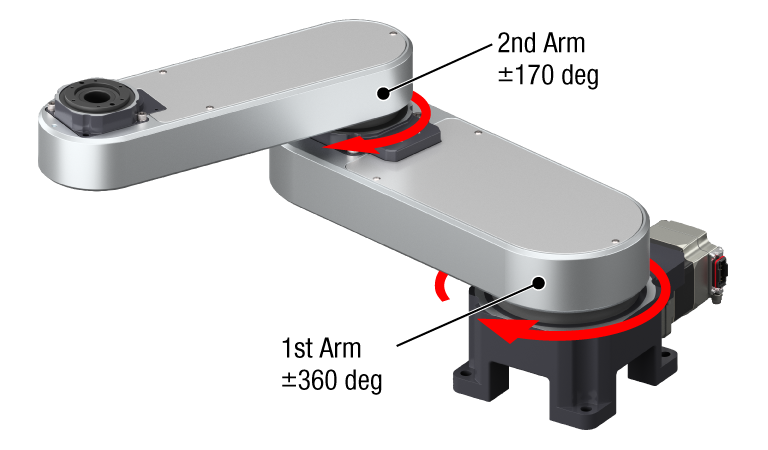
| Arbeitsbereich* | 1. Achse | ±170 Grad | ±360 Grad | ±360 Grad |
| 2. Achse | ±140 Grad | ±170 Grad | ±170 Grad | |
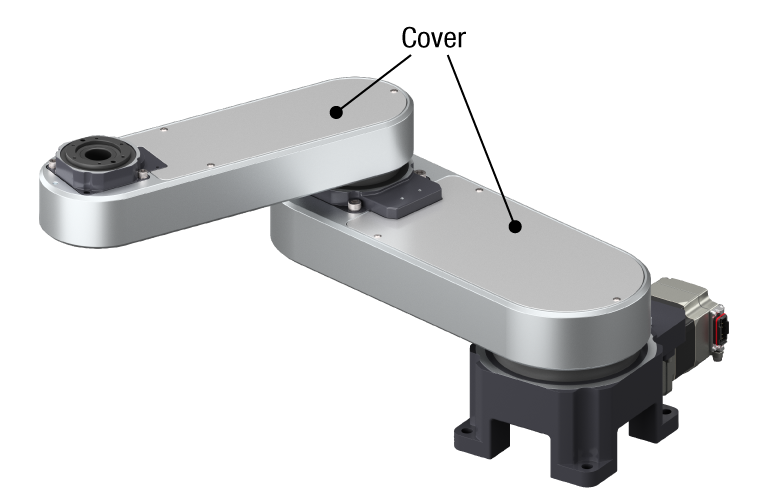
| Verkleidung | - | Mit Verkleidung | Mit Verkleidung | |
- *Maximaler Arbeitsbereich, wenn sich der Positionierstift im Referenzstiftloch befindet.
Omnidirektionale Bewegung für eine verkürzte Taktzeit
Es sind Produkte erhältlich, die omnidirektionale Bewegungen ausführen können.
Vergleich der Funktionsweise zwischen der Standardversion und der omnidirektionalen Version
Die neue omnidirektionale Version ermöglicht es dem Arm, über den Roboter zu fahren, was eine optimierte Annäherung ermöglicht.
Dadurch kann die Taktzeit im Vergleich zur Standardversion um 37 % reduziert werden.
Arbeitsbereich
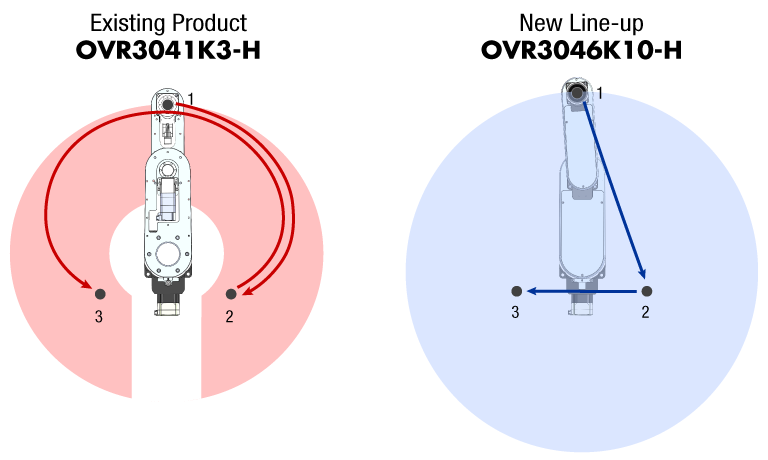
Standardversion OVR3041K3-H
Taktzeit: 8,6 Sekunden
Omnidirektionale Version OVR3046K10-H
Taktzeit: 5,4 Sekunden
Einfacher staubgeschützter Aufbau
Die omnidirektionale Version verfügt über eine einfache Staubschutzverkleidung. Diese Verkleidung verhindert das Eindringen von Fremdkörpern und reduziert den Kabelverschleiß.
Kundenseitig anpassbares Design
Anwendungsbeispiele
Das Roboterdesign kann je nach Anwendung kundenseitig frei angepasst werden.
- Flacher und kompakter Aufbau
- Der dritte Arm kann frei gestaltet werden.
- Die Kombination mit elektrischen Hubsäulen und Aktuatoren erweitert den Arbeitsbereich nicht nur horizontal, sondern auch vertikal.
1. Beispiel: Anheben eines Roboters
Die Höhe der Roboterspitze kann gering gehalten werden, sodass der Roboter auch in niedrige Räume passt. Da es keine horizontalen Kollisionsstellen gibt, ist ein omnidirektionaler Betrieb möglich.
Einbausituation: Boden- oder Deckenmontage
Vertikaler Hub: kurz bis mittel (50-300 mm)

| ➀ | OVR 3-Achs SCARA-Kleinroboter OVR3070K3-H |
|---|---|
| ➁ | Elektrische Hubsäulen der EL-Serie EL1210AZMK |
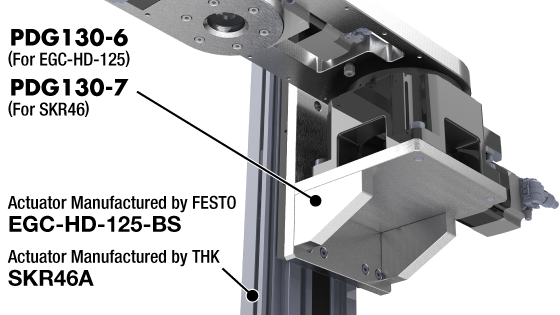
2. Beispiel: Vertikale Arbeitsrichtung eines Roboters
Die Höhe der Roboterspitze kann gering gehalten werden, sodass der Roboter auch in niedrige Räume passt. Erweiteter Anwendungsbereich für vertikale Anwendungen.
Einbausituation: Wandmontage * Bei der omnidirektionalen Version können einige Teile nicht bewegt werden.
Vertikaler Hub: Kurz bis lang

| ➀ | OVR 3-Achs SCARA-Kleinroboter OVR3041K3-H |
|---|---|
| ➁ | Montagewinkel PDG130-6 |
| ➂ | Aktuator, hergestellt von FESTO EGC-HD-125-BS |
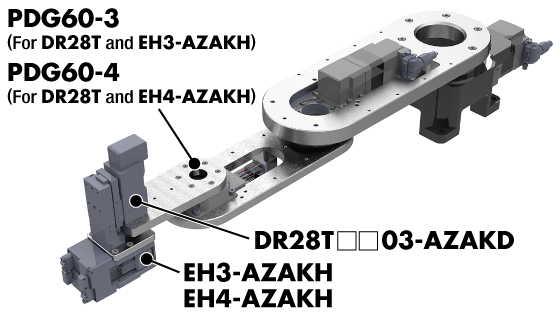
3. Beispiel: Vertikales Verfahren eines Endeffektors
Kompakter, vertikaler Betrieb ist möglich.
Einbausituation: Bodenmontage
Vertikaler Hub: kurz (30 mm)

| ➀ | OVR 3-Achs SCARA-Kleinroboter OVR3041K3-H |
|---|---|
| ➁ | Montagewinkel PDG60-4 |
| ➂ | Kompakter Elektrozylinder DR28T■■03-AZAKD |
| ➃ | Elektrischer Greifer der EH-Serie EH4-AZAKH |
4. Beispiel: Drehantrieb für Endeffektoren
Der Winkel des Endeffektors kann verändert werden, beispielsweise um das Werkstück zu schwenken.
Einbausituation: Boden- oder Deckenmontage

| ➀ | OVR 3-Ach SCARA-Kleinroboter OVR3041K3-H |
|---|---|
| ➁ | Motoren der AZ-Serie + Harmonic-Getriebe AZM24AK + CSF-8-■-2UP-SP-A |
| ➂ | Montagewinkel PDG60-5 |
| ➃ | Roboterflansch-Adapter P3F2 |
| ➄ | Elektrischer Greifer der EH-Serie EH4-AZAKH |
Nützliche Zubehörteile für eine schnelle Installation des Roboters sind erhältlich.
Wählbarer Einbausituation
Es ist eine Boden- oder Deckenmontage möglich.
| Einbausituation | Bodenmontage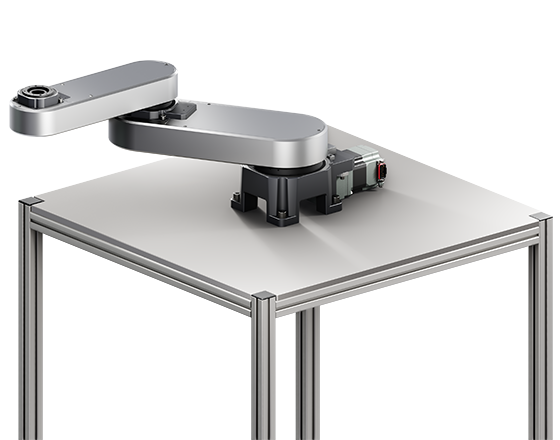
|
Deckenmontage
|
|---|---|---|
| Einbauaufwand | Einfache Montage | ・Der Roboter muss über Kopf montiert werden ・Eine stabiler Untergrund zur Montage ist erforderlich |
| Arbeitsbereich | Paletten und andere Komponenten müssen unter Berücksichtigung des Platzbedarfs für den Roboter positioniert werden. | Der Raum unter dem Roboter kann genutzt werden. |
Das Video zeigt verschiedene Bewegungsmöglichkeiten bei der Deckenmontage. Durch die Deckenmontage kann der Arbeitsbereich unterhalb des Roboters effizient genutzt werden.
Eigenständige Wartung ist möglich

Die elektrische Aktuatoren der einzelnen Achsen können vom Kunden selbst ausgetauscht werden. Dies reduziert den Wartungsaufwand (Kosten und Zeit) nach der Installation.
- *Wartung und Instandhaltung können auch von Oriental Motor vorgenommen werden. Bitte wenden Sie sich an die nächste Niederlassung oder Vertriebsbüro von Oriental Motor.
Einfach zu programmierende Robotersteuerung

MRC01 ist eine Robotersteuerung, die Roboter steuern kann, die mit der AZ-Serie ausgestattet sind.
Die kostenlose Parametrier-Software MRC Studio ist so einfach, dass selbst Unerfahrene im Robotersteuern sie schnell beherrschen können.

Die MRCU-Serie ist ebenfalls verfügbar und kombiniert die Robotersteuerung MRC01 und den AZ-Treiber (mit bis zu 8 Achsen) in einem Paket.
Sie senkt die Hindernisse bei der Roboterinbetriebnahme und trägt zu kürzeren Inbetriebnahmezeiten bei.
Hier klicken für Details zur integrierten Robotersteuerung der MRCU-Serie und Treiber.
- Hinweis: Bitte beachten Sie die Sicherheitsvorschriften für Industrieroboter. (Kann nicht als Cobot verwendet werden.)
Verwendung der AZ-Serie mit integriertem, batterielosem Absolutencoder
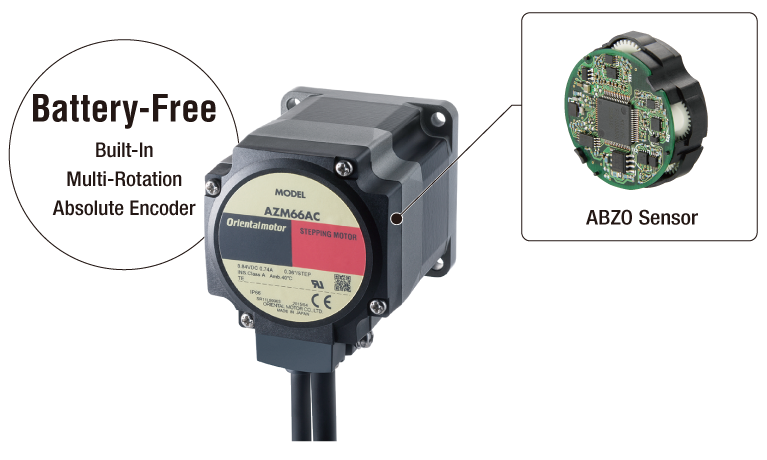
Alle Achsen verwenden die Motoren der αSTEP AZ-Serie (für DC-Stromversorgung).
Das Absolutsystem macht externe Sensoren überflüssig und reduziert den Verdrahtungsaufwand. Keine Batterieverwaltung und reduzierte Wartung.
Eine einfache Leitungsführung der Stromversorgung ist möglich. Änderungen an der Leitungsführung können flexibel durchgeführt werden.
Nützliche Software für die Inbetriebnahme der Roboter
MRC Studio Simulator

Der MRC Studio Simulator ist eine kostenlose Software, die die Simulation tatsächlicher Bewegungen ohne den Roboter selbst oder MRC01 ermöglicht.
Hier klicken für DetailsMRC Reality

Mit dem MRC Studio Simulator erstellte Programme können bei der Installation tatsächlicher Roboter unverändert verwendet werden.
Es stehen Apps für Smartphones/Tablets und für Virtual-Reality-Headsets (Meta Quest 3) zur Verfügung.
Nähere Produktinformationen
Hier klicken für detaillierte Produktinformationen wie Spezifikationen, Eigenschaften, Abmessungen, CAD, Bedienungsanleitungen usw.
OVR3041K3-H (Maximale Reichweite: 410 mm)
OVR3046K10-H (Maximale Reichweite: 460 mm)
OVR3070K3-H (Maximale Reichweite: 700 mm)
Einfache Implementierung von Robotern in bestehende Systeme
Die MRC-Serie kann über eine EtherNet/IP™-Schnittstelle mit dem Host-Controller verbunden werden. OVR-Kleinroboter können ohne wesentliche Änderungen im Host-Controller problemlos in bestehende Anlagen implementiert werden. Die Programmierung des Roboters erfolgt mit der kostenlosen Parametrier-Software MRC Studio . Die Kleinroboter OVR verfügen über Grundkonfigurationen, was die Erstinbetriebnahme vereinfacht.
- * EtherNet/IP™ ist eine Marke von ODVA.
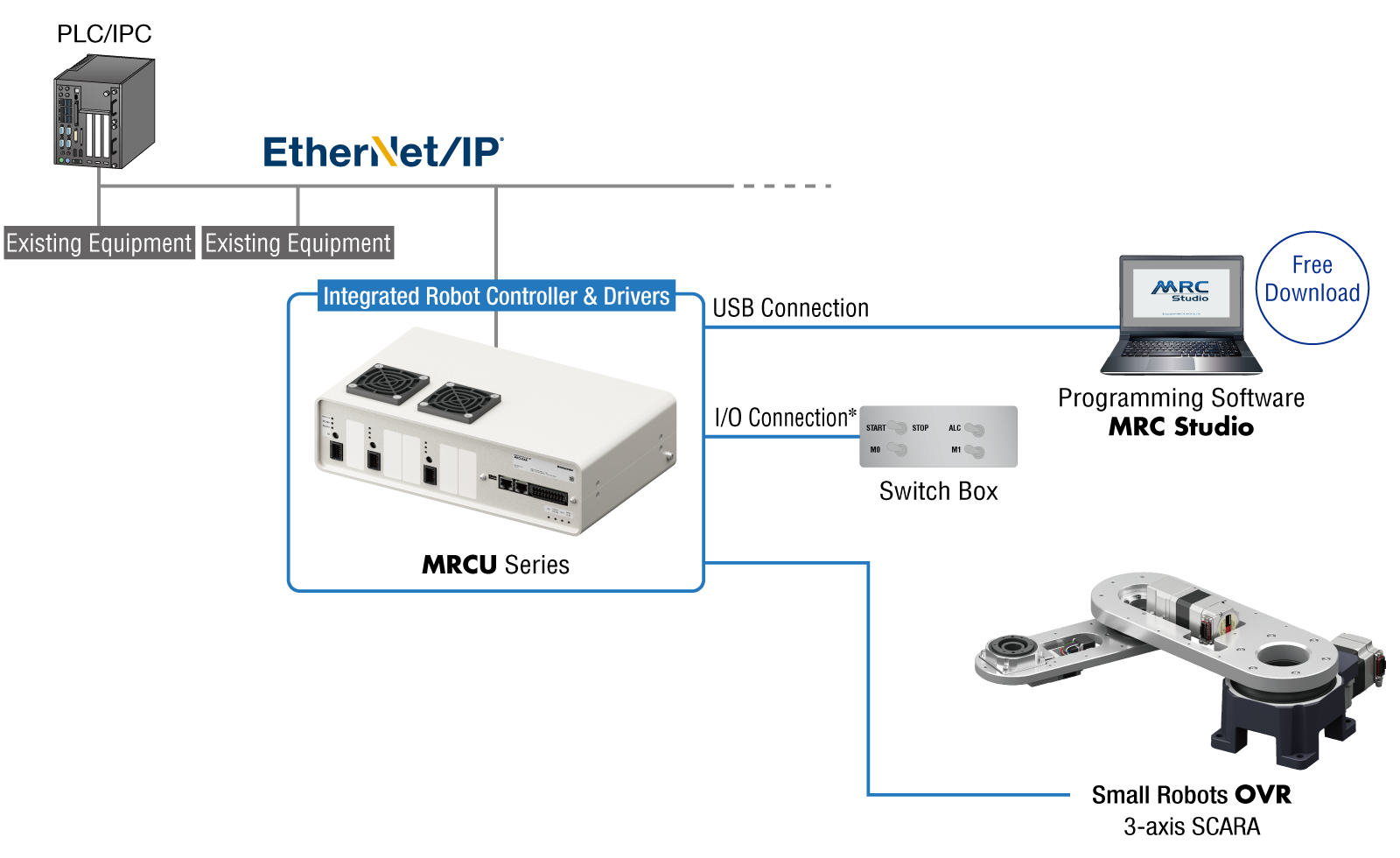
- * Die Robotersteuerung MRCU kann auch ohne Host-Controller mittels I/O-Signalen betrieben werden.
- ・Zusätzlich werden DC-Stromversorgung und Endeffektoren benötigt.
- ・Kabel müssen separat bestellt werden.
- ・Als Stromversorgungskabel ist das CC09MRCU030 (3 m Länge) erhältlich.
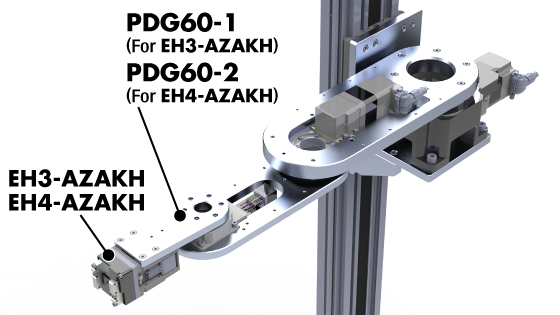
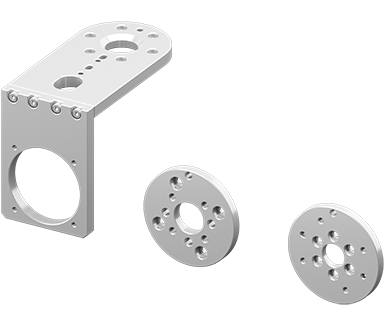
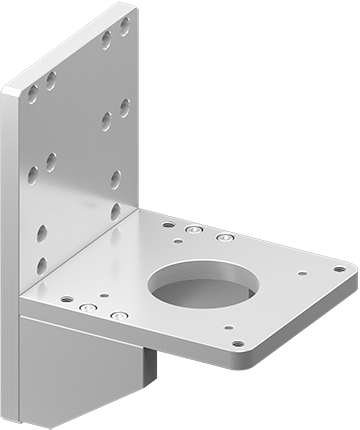
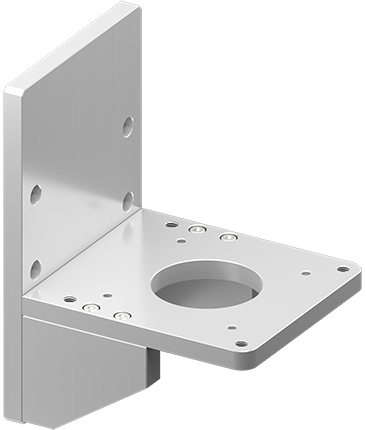
Montagewinkel für 3-Achs SCARA
Es stehen verschiedene Montagewinkel für 3-Achs SCARA-Roboter zur Auswahl.
| Produktname | Geeignete Roboter | Einbausituation |
|---|---|---|
|
OVR3041K3-H OVR3046K10-H OVR3070K3-H |
 |
|
||
|
|
OVR3041K3-H OVR3046K10-H*1 OVR3070K3-H*1 |
 |
|
|
||
|
OVR3041K3-H | 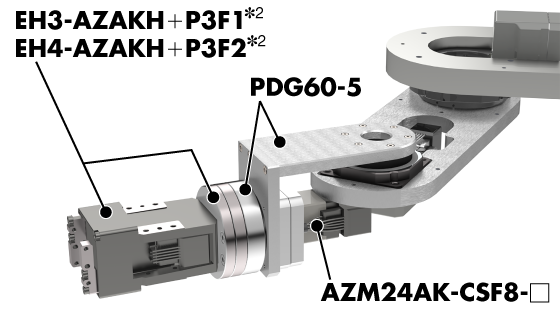 |
|
OVR3041K3-H OVR3046K10-H OVR3070K3-H |
 |
|
- *1 Bei diesen Robotern kann beim ausgefahrenen Elektrozylinder der DR-Serie die omnidirektionale Funktion beeinträchtigt sein.
- *2 Bei Kombination mit dem elektrischen Greifer der EH-Serie werden die separat erhältlichen Roboterflansch-Adapter P3F1 (für EH3-AZAKH) oder P3F2 (für EH4-AZAKH) empfohlen.
Verwandte Produkte
Elektrische Hubsäulen der EL-Serie
Die elektrischen Hubsäulen der EL-Serie können mit Robotern kombiniert werden, um den Arbeitsbereich in vertikaler Richtung zu erweitern. Die Serie umfasst Modelle mit hoher Steifigkeit, hoher Präzision und mit Hüben von 50 bis 300 mm. Trägt zur Reduzierung des Zeitaufwands für die Konstruktion, Montage und Inbetriebnahme von Anlagen bei.
- Hubsäulen zur Erweiterung des Arbeitsbereichs von Robotern
- Reduzierter Zeitaufwand für Konstruktion, Montage und Inbetriebnahme
- Hohe Steifigkeit und hohe Genauigkeit
- Hub: 50/100/200/300 mm
- Antriebsmotor: AZ-Serie mit integriertem batterielosem Absolutencoder (für DC-Stromversorgung)