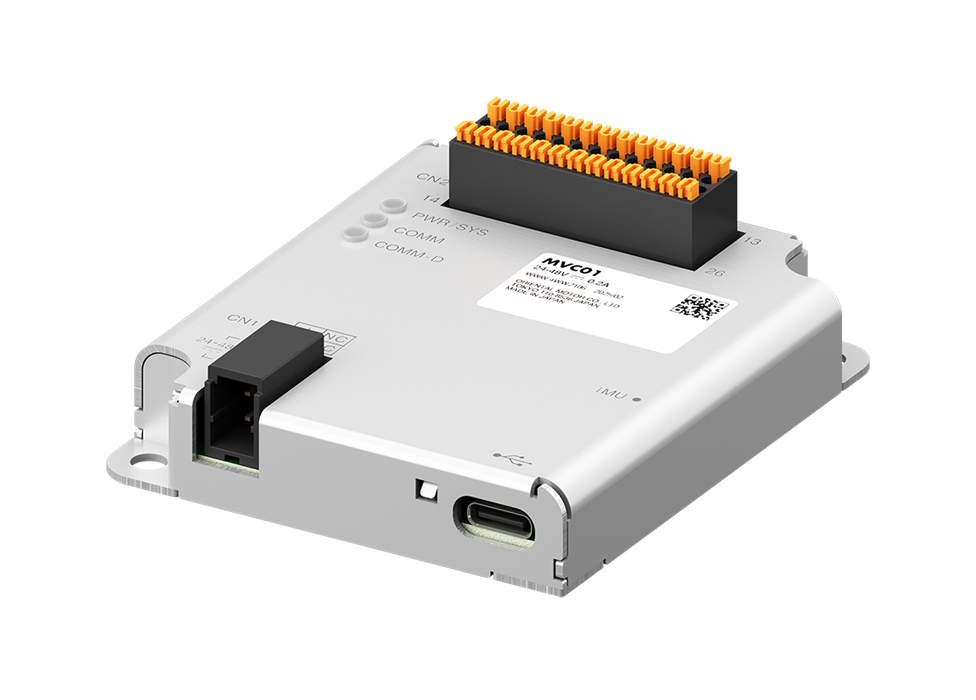
Mobile Robotersteuerung
MVC01
- Modulare Fahrfunktionen für Transportroboter (AGV/AMR)
- Software unterstützt Inbetriebnahme und Instandhaltung
- Schlupfkorrektur durch Trägheitsnavigationssystem
- Kombinierbar mit BLV-R-Serie
Eigenschaften | Mobile Robotersteuerung MVC01
Mobile Robotersteuerung – gewährleistet eine genaue Bewegung von Transportrobotern
- Die mobile Robotersteuerung steuert die Motoren eines Roboters basierend auf den Vorgaben von Host-Controllern.
- Ermittelt die Koordinaten für das eigenständige Fahren, um eine genaue Bewegung zu gewährleisten.
- Im Vergleich zur direkten Steuerung durch Host-Controller kann die Anzahl der ROS-Knoten reduziert werden, was zu einer Verringerung des Softwareaufwands beiträgt.
- Die mobile Robotersteuerung kann mit den bürstenlosen DC-Motoren der BLV-R-Serie kombiniert werden.

Reduzierter Softwareaufwand in Kombination mit einem Host-Controller
Mobile Robotersteuerungen sind mit den für den Betrieb von AGV/AMR erforderlichen Fahrfunktionen ausgestattet. Um eine synchrone Steuerung zwischen den Achsen zu gewährleisten, berechnet die mobile Robotersteuerung die Geschwindigkeit für jedes Rad einzeln. Dies reduziert den Softwareaufwand im Host-Controller.
Modulare Fahrfunktionen für Transportroboter (AGV/AMR)
| Steuerung über Host-Controller | Steuerung über Host-Controller und mobile Robotersteuerung |
|---|---|
| Der Host-Controller kümmert sich um die Hauptanwendung und muss auch noch alle Fahrdaten berechnen. | Aufgabenverteilung: ・Fahrdaten → mobile Robotersteuerung ・Hauptanwendung → Host-Controller |
| Große Softwareaufwand | Geringer Softwareaufwand |
Bauteilvergleich AMR

Vergleich der einzelnen Arbeitsschritte

Hoher kundenseitiger Freiheitsgrad bei der Auswahl von Rädern, Antriebssystemen usw. durch modulare Antriebsfunktionen
Bei Änderungen an der Mechanik muss das ROS-Programm angepasst werden, z. B. bei einem Rädertausch. Dies erhöht den Änderungsaufwand. Durch die Verwendung von MVC01 für die Fahrdaten bleiben die Einstellungen auf der Host-Seite auch bei einem Radwechsel unverändert und können in MVC Studio einfach neu konfiguriert werden.

Konstruktionsänderung

Änderungen an den Rädern oder der Robotergröße können einfach in der MVC01-Steuerung vorgenommen werden
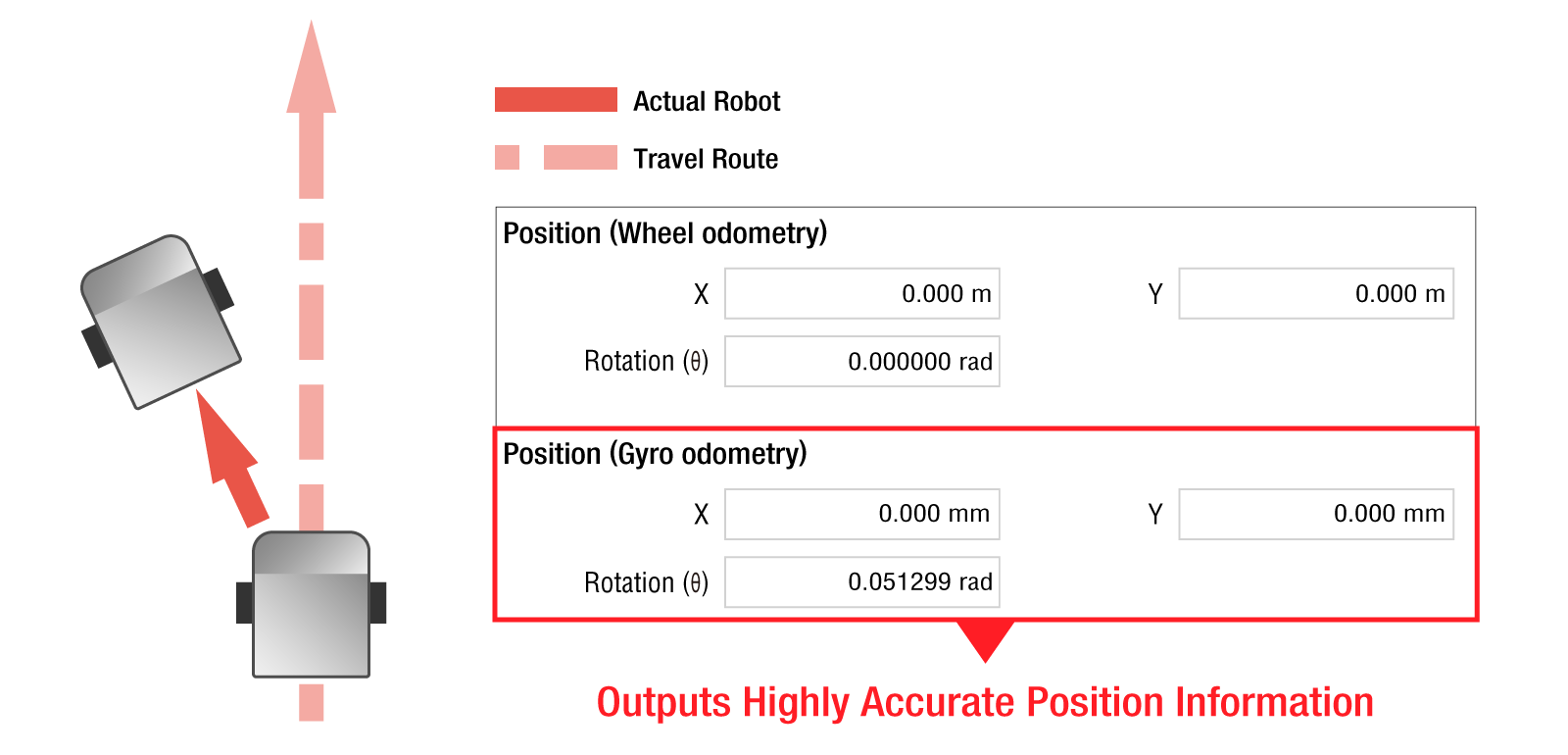
Schlupfkorrektur durch Trägheitsnavigationssystem
Mit dem im Trägheitsnavigationssystem enthaltenen Trägheitssensor (inertial measurement unit, IMU) kann die mobile Robotersteuerung Positionsdaten ausgeben, die mittels Gyro-Odometrie berechnet wurden.
Gyro-Odometrie ist eine Methode zur Bewertung von Positionsinformationen aus den Encoderdaten der IMU und des Motors.
Beim Fahren auf unebenem Gelände kann es aufgrund einseitig fehlender Bodenhaftung leicht zu Positionsfehlern kommen. Die Robotersteuerung kann mit Hilfe der präziseren Positionsdaten der IMU die tatsächliche Position korrigieren.
Trägheitssensor (IMU)
Ein Sensor, der die tatsächlich zurückgelegte Strecke und Richtung erkennen kann.
Erkennt dreidimensionale Trägheitsbewegungen (Translation und Rotation in Richtung der drei kartesischen Achsen).

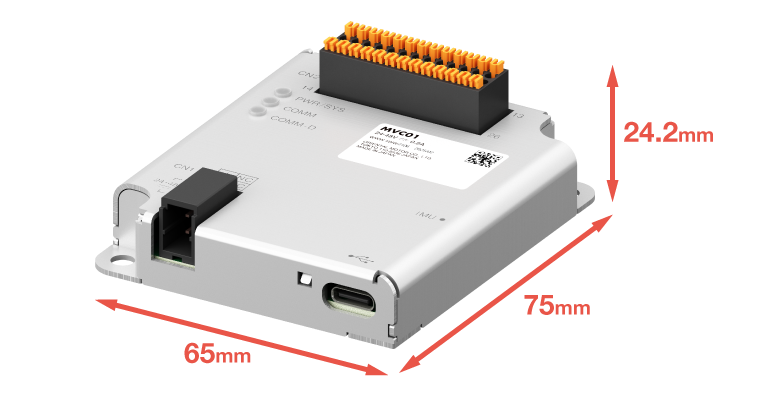
Kompakte Bauform
Geringer Platzbedarf Die Abmessungen entsprechen denen des Treibers der BLV-R-Serie.
Mobile Robotersteuerung
Gewicht: 60 g
Treiber der BLV-R-Serie
Gewicht: 120 g

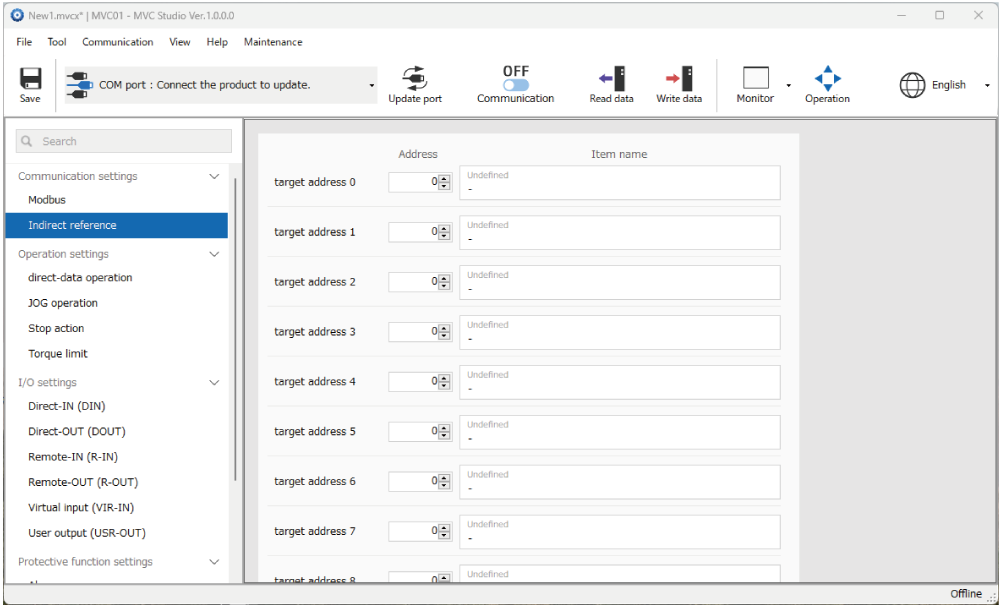
Kostenlose Software MVC Studio
Die Software unterstützt die Inbetriebnahme und Instandhaltung. Neben dem Einstellen und Bearbeiten verschiedener Parameter können verschiedene Status überwacht werden. Die Software steht zum kostenlosen Download zur Verfügung.

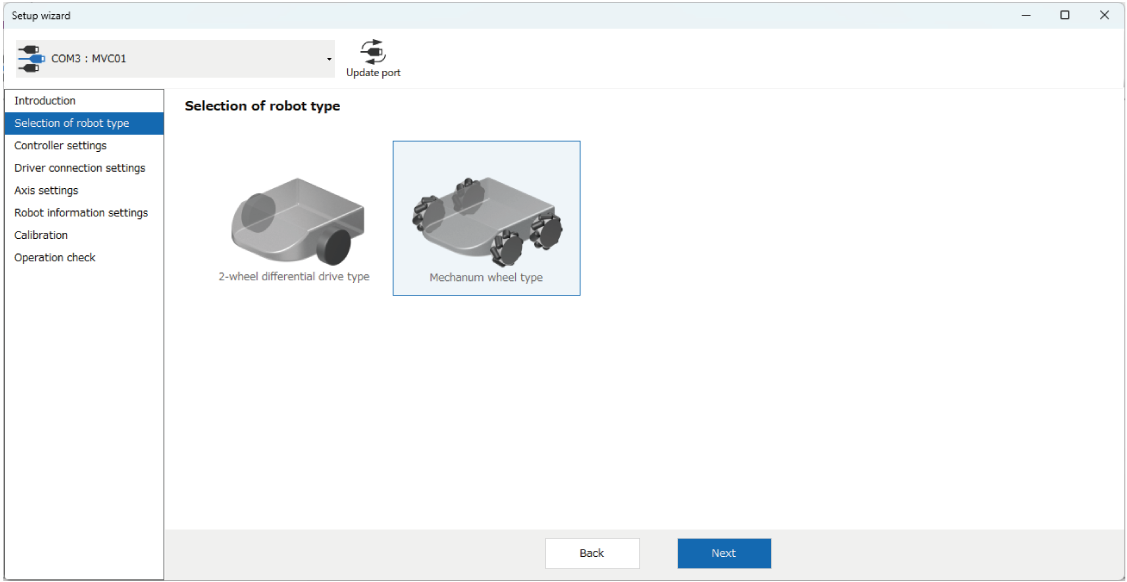
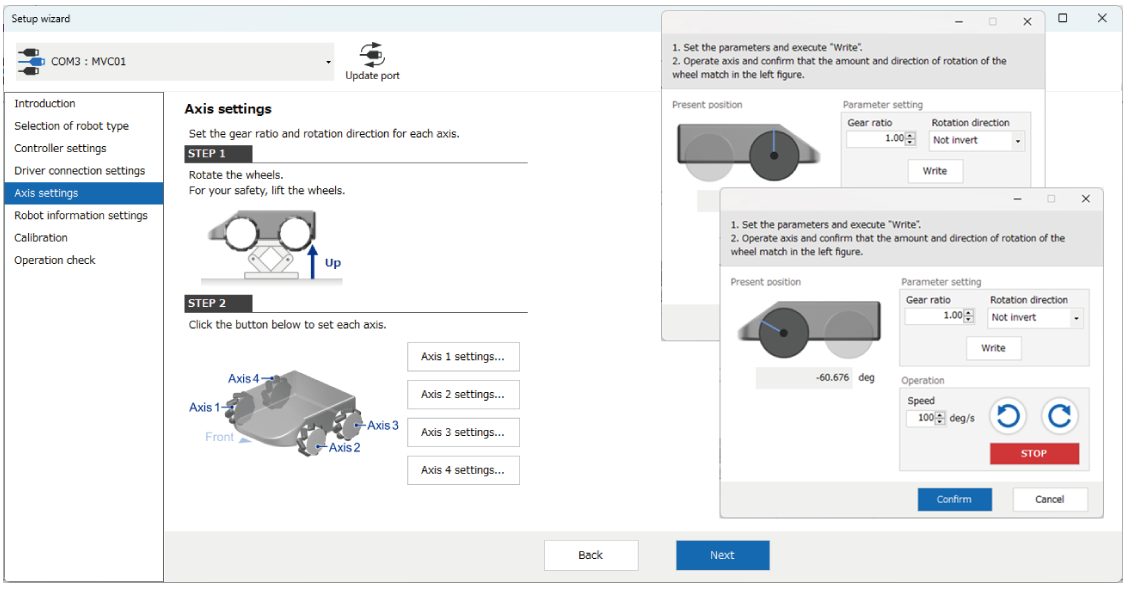
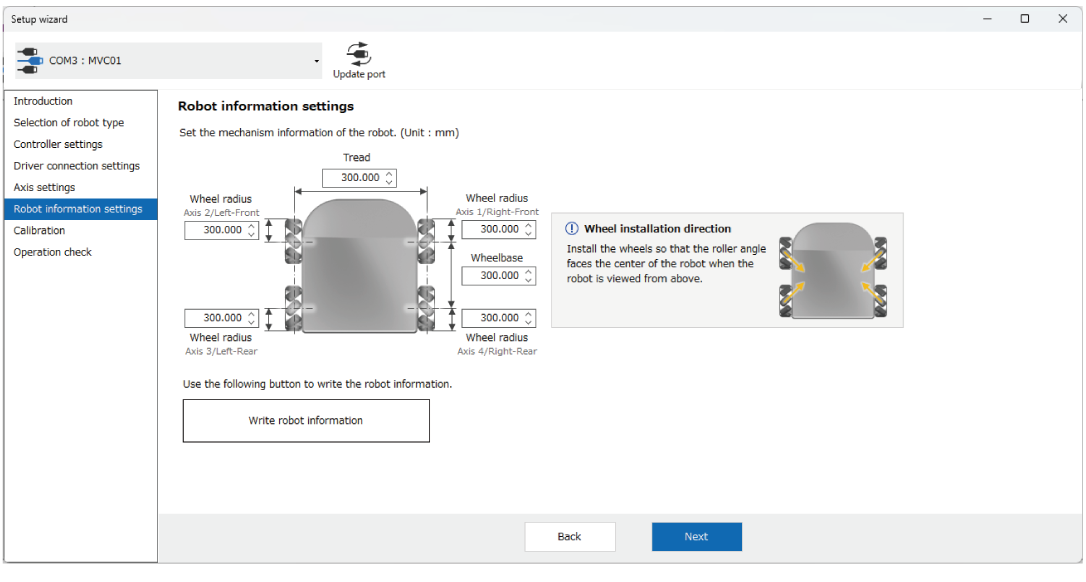
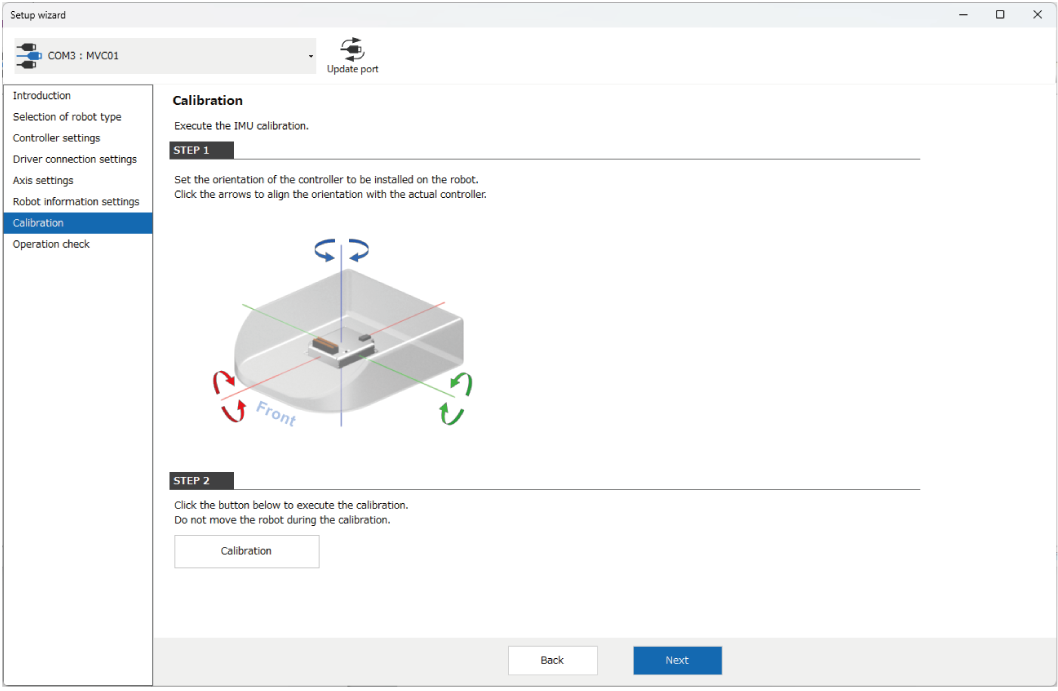
Menügeführte Erstinbetriebnahme
Grundeinstellungen wie die Auswahl des Antriebssystems (Zweiradantrieb, Vierradantrieb) und weitere Parameter werden mithilfe eines Setup-Wizard vorgenommen. Mit Hilfe der illustrierten Anweisungen in der Bedienungsanleitung können selbst Erstbenutzer die Einstellungen in kurzer Zeit vornehmen.
Inbetriebnahmeschritte
Inbetriebnahme mit Hilfe des Setup-Wizard.
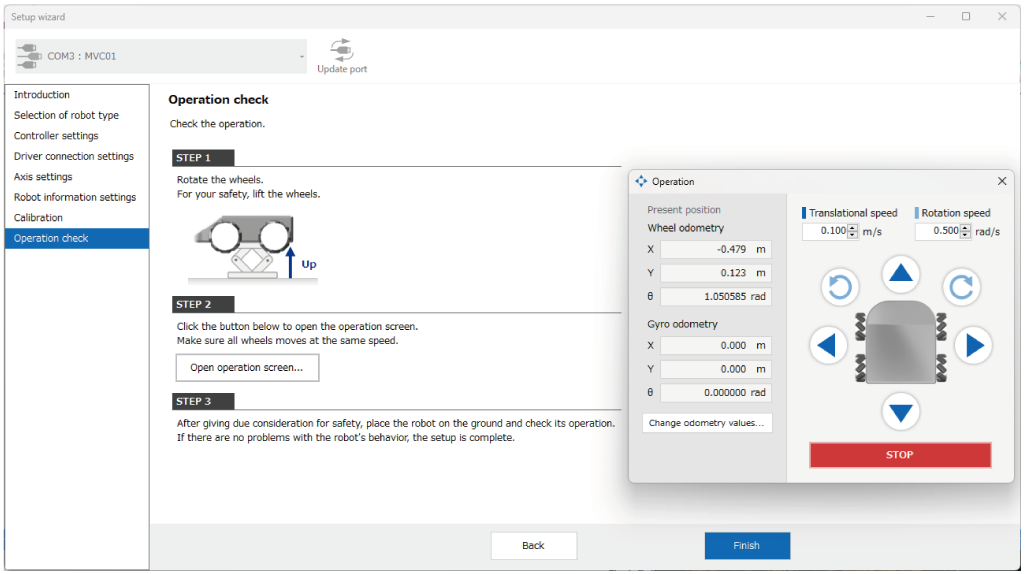
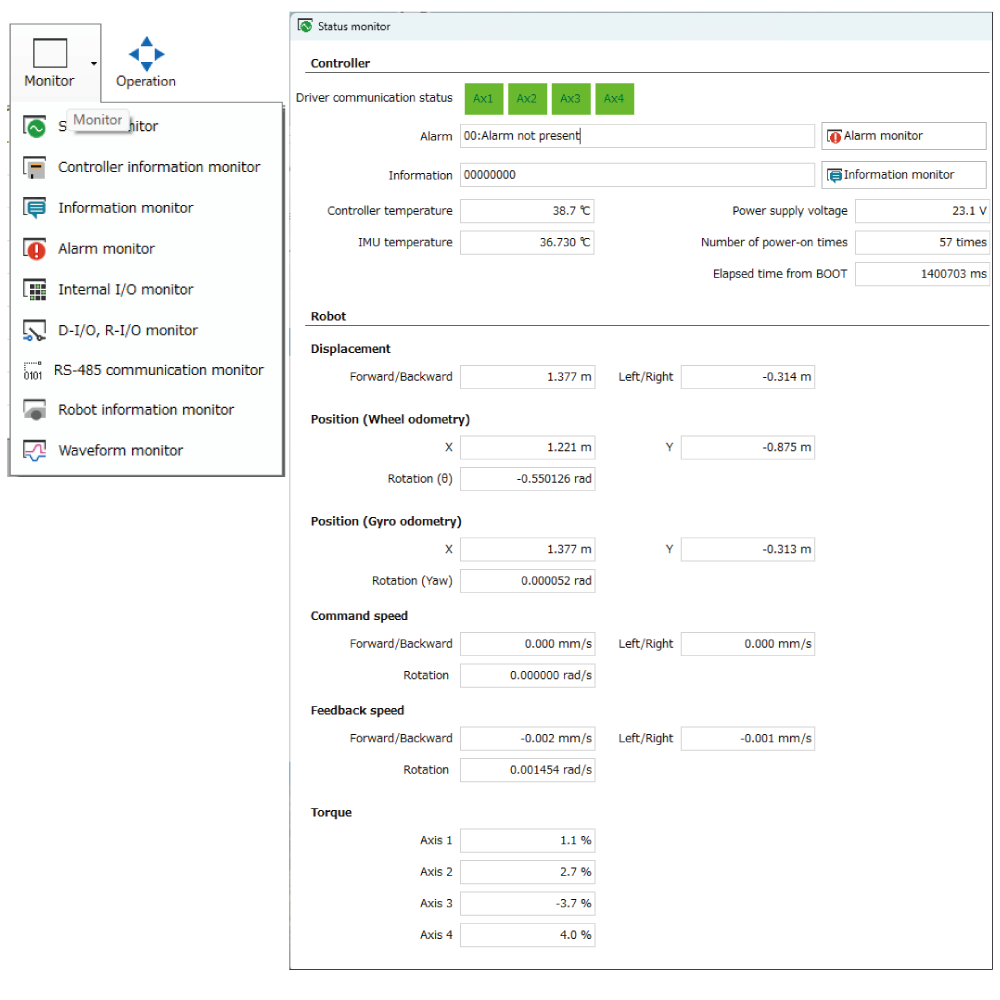
„Parameter Setting“ und „Monitoring Function“ für Inbetriebnahme und Wartung
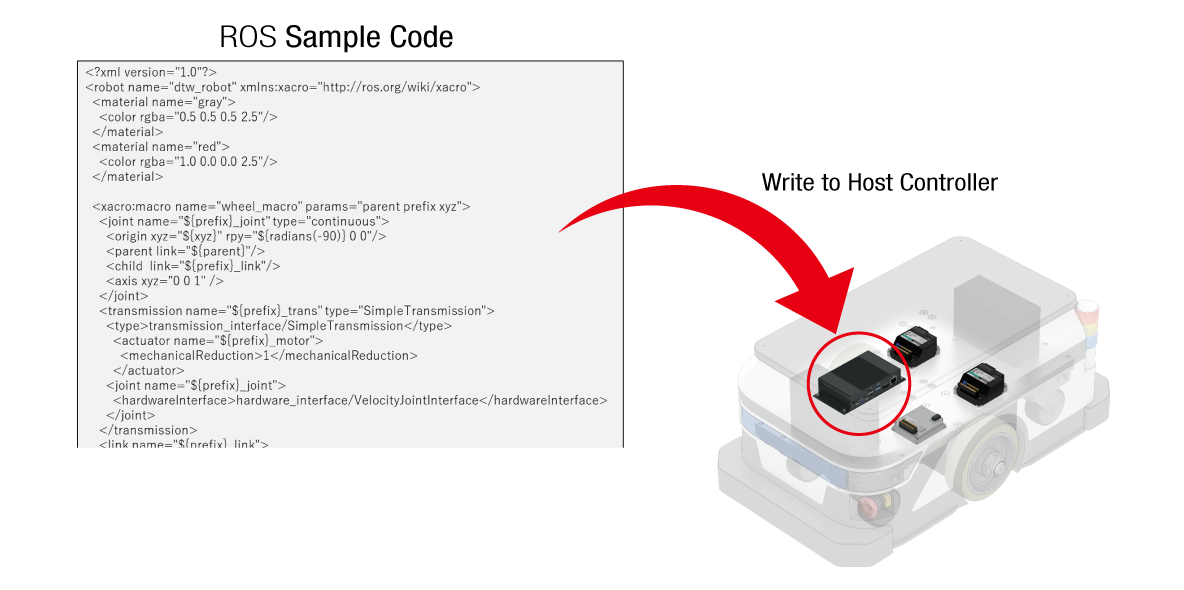
Unterstützung bei der Programmierung
ROS-Netzknoten, Handbücher und Codebeispiele für ROS2 sind verfügbar. Bei Bedarf bietet Oriental Motor die Erstellung von Beispielprogrammen an, z. B. die Implementierung einer mobilen Robotersteuerung.
Unterstützungsmöglichkeiten
- Allgemeine technische Beratung zu MVC01
- Unterstützung bei der Konfiguration der Umgebung einschließlich eines Betriebssystems, z. B. beim Einsatz eines Raspberry Pi als Host-Controller (einschließlich ROS-Umgebung)
- Erstellen von Beispielcode zur Steuerung von MVC01 mit einem Gamepad
- * Oriental Motor bietet keinen Support für autonomes Fahren mit externen Sensoren (Linienfolger oder LiDAR).
Geeignete Produkte
Die Robotersteuerung kann mit den bürstenlosen DC-Motoren der BLV-R-Serie kombiniert werden.
Für die BLV-R-Serie sind auch Antriebsradmotoren erhältlich, die direkt auf Rädern montiert werden können.
Bürstenlose DC-Motoren

Produkte eingrenzen
Download
Katalog

MVC01-Serie
Robotersteuerung für AGV/AMR
