Kleinroboter OVR
4-Achs Knickarmroboter
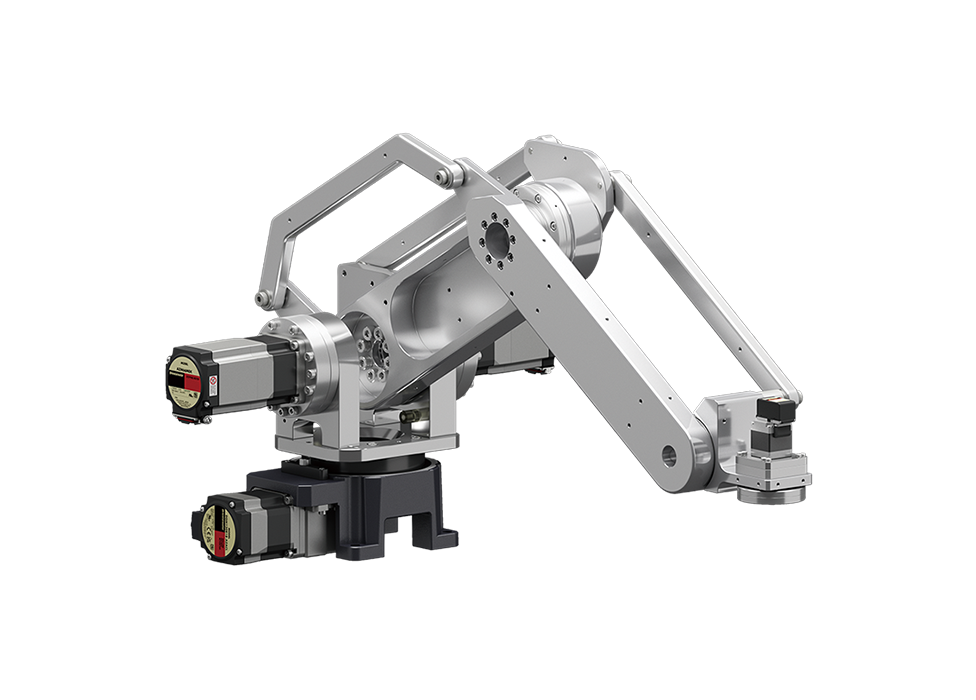
- Parallelogramm-Mechanik
- Gleichförmiger horizontaler Transport mit Roboterarmspitze auf gleicher Höhe mit Einbaufläche
- Maximale Transportlast 5 kg
- Maximale horizontale Reichweite 480/680/880 mm
- Verwendung der AZ-Serie mit integriertem, batterielosem Absolutencoder (für DC-Stromversorgung)
Eigenschaften | 4-Achs Knickarmroboter
- Leichter und stabiler horizontaler Transport durch Parallelogramm-Mechanik
- Eigenständige Wartung ist möglich
- Kundenseitig anpassbares Design
- Einfach zu programmierende Robotersteuerung
- Verwendung der AZ-Serie mit integriertem, batterielosem Absolutencoder
- Nützliche Software für die Inbetriebnahme der Roboter
- Nähere Informationen zum Produkt
- Spezifikationen
- Einfache Integration von Robotern in bestehende Systeme
- Anwendungsbeispiele
- Montagewinkel ermöglicht das Drehen und Neigen eines Endeffektors
Leichter und stabiler horizontaler Transport durch Parallelogramm-Mechanik
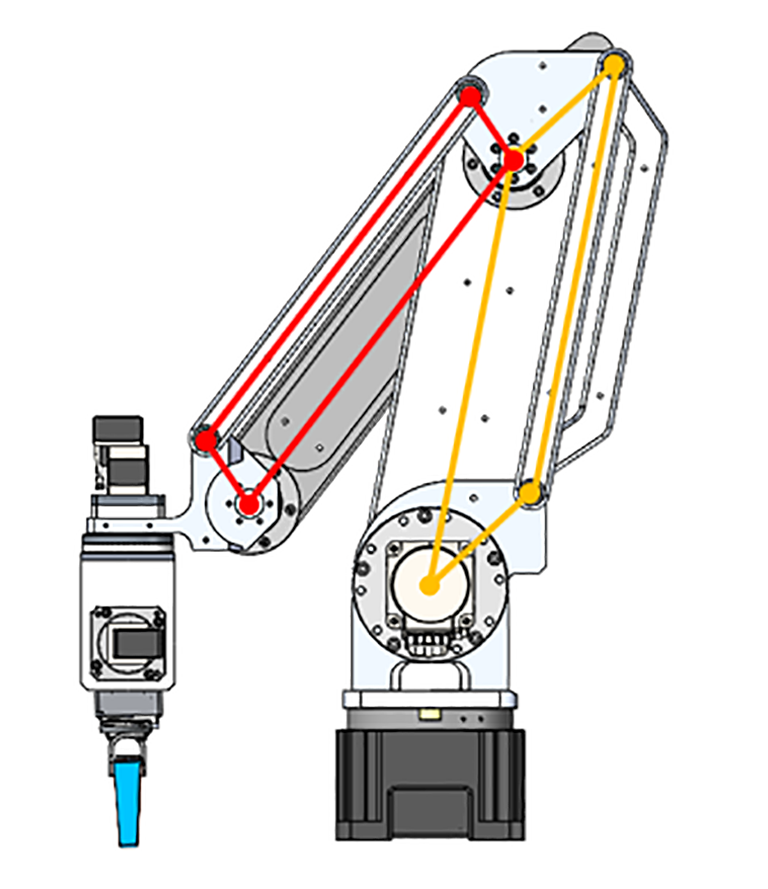
The parallel link mechanism offers the following benefits:
- Maximale Transportlast von 5 kg: Dies wird erreicht, indem die Motoren, welche die 2 Arme antreiben, außerhalb des belasteten Arms platziert werden, wodurch das Gewicht auf den Gelenken reduziert wird.
- Horizontaler Transport: Die Spitze des Roboterarms kann immer auf gleicher Höhe mit der Einbaufläche sein, was einen gleichförmigen horizontalen Transport ermöglicht.
Eigenständige Wartung ist möglich

Die elektrische Aktuatoren der einzelnen Achsen können vom Kunden selbst ausgetauscht werden. Dies reduziert den Wartungsaufwand (Kosten und Zeit) nach der Installation.
- *Wartung und Instandhaltung können auch von Oriental Motor vorgenommen werden. Bitte wenden Sie sich an die nächste Niederlassung oder Vertriebsbüro von Oriental Motor.
Kundenseitig anpassbares Design

Es stehen zwei Robotern mit unterschiedlichen Reichweiten zur Auswahl: 580 mm oder 780 mm
Einfach zu programmierende Robotersteuerung

MRC01 ist eine Robotersteuerung, die Roboter steuern kann, die mit der AZ-Serie ausgestattet sind.
Die kostenlose Parametrier-Software MRC Studio ist so einfach, dass selbst Unerfahrene im Robotersteuern sie schnell beherrschen können.

Die MRCU-Serie ist ebenfalls verfügbar und kombiniert die Robotersteuerung MRC01 und den AZ-Treiber (mit bis zu 8 Achsen) in einem Paket.
Sie senkt die Hindernisse bei der Roboterinbetriebnahme und trägt zu kürzeren Inbetriebnahmezeiten bei.
Hier klicken für Details zur integrierten Robotersteuerung der MRCU-Serie & Treiber
- Hinweis: Bitte beachten Sie die Sicherheitsvorschriften für Industrieroboter. (Kann nicht als Cobot verwendet werden.)
Verwendung der AZ-Serie mit integriertem, batterielosem Absolutencoder
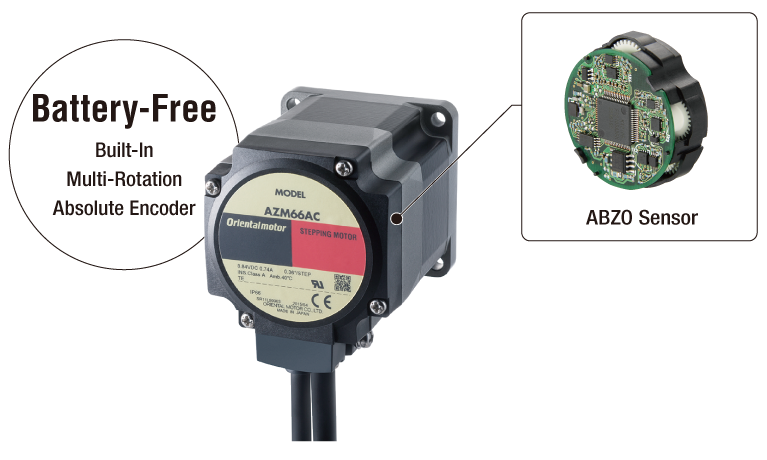
Alle Achsen verwenden die Motoren der αSTEP AZ-Serie (für DC-Stromversorgung).
Das Absolutsystem macht externe Sensoren überflüssig und reduziert den Verdrahtungsaufwand. Keine Batterieverwaltung und reduzierte Wartung.
Eine einfache Leitungsführung der Stromversorgung ist möglich. Änderungen an der Leitungsführung können flexibel durchgeführt werden.
Nützliche Software für die Inbetriebnahme der Roboter
MRC Studio Simulator

Der MRC Studio Simulator ist eine kostenlose Software, die die Simulation tatsächlicher Bewegungen ohne den Roboter selbst oder MRC01 ermöglicht.
Hier klicken für DetailsMRC Reality

Mit dem MRC Studio Simulator erstellte Programme können bei der Installation tatsächlicher Roboter unverändert verwendet werden.
Es stehen Apps für Smartphones/Tablets und für Virtual-Reality-Headsets (Meta Quest 3) zur Verfügung.
Nähere Informationen zum Produkt
Hier klicken für detaillierte Produktinformationen wie Spezifikationen, Eigenschaften, Abmessungen, CAD, Bedienungsanleitungen.
OVR4048K5-V (maximale Reichweite 480 mm)
OVR4068K5-V (maximale Reichweite 680 mm)
OVR4088K5-V (maximale Reichweite 880 mm)
Spezifikationen
| Produktname |

OVR4048K5-V |

OVR4068K5-V |

OVR4088K5-V |
|
|---|---|---|---|---|
| Anzahl der Achsen | 4 Achsen | |||
| Stromversorgung | 24 VDC | |||
| Maximale Reichweite | Vertikal | 570 mm | 750 mm | 900 mm |
| Horizontal | 480 mm | 680 mm | 880 mm | |
| Transportlast | 5 kg | |||
| Zykluszeit (Referenz)*1 | 0,7 Sek. | |||
| Arbeitsbereich*2 | S-Achse (Rotation) | ±170 Grad | ||
| L-Achse (Lower, unterer Arm) | −27 bis +80 Grad | |||
| U-Achse (Upper, oberer Arm) | −58 bis +35 Grad | |||
| R-Achse (Drehen des Endeffektors) | ±180 Grad*3 | |||
| Wiederholpositioniergenauigkeit*4 | ±0,05 mm | |||
| Zulässiges Lastträgheitsmoment (R-Achse) | 0,069 kgm² | |||
| Gewicht | 16 kg | 17 kg | 18 kg | |
| Einbausituation | Bodenmontage | |||
- *1: Die Zeit, in der eine Last von 1 kg um 25 mm gehoben, um 300 mm seitwärts bewegt und wieder zurück in die Ausgangsposition gebracht werden kann. Zykluszeit bei Verwendung der Robotersteuerung MRC01.
- *2: Arbeitsbereich in ±-Richtung bezogen auf die Grundstellung (0 Grad).
- *3: ±170 Grad bei Verwendung der Robotersteuerung MRC01.
- *4: Basierend auf der Spezifikation der verwendeten Getriebe aller Achsen.
- *Empfohlene Kapazität der Stromversorgung: 24 VDC 500 W
Einfache Implementierung von Robotern in bestehende Systeme
Die MRC-Serie kann über eine EtherNet/IP™-Schnittstelle mit dem Host-Controller verbunden werden. OVR-Kleinroboter können ohne wesentliche Änderungen im Host-Controller problemlos in bestehende Anlagen implementiert werden. Die Programmierung des Roboters erfolgt mit der kostenlosen Parametrier-Software MRC Studio. Die Kleinroboter OVR verfügen über Grundkonfigurationen, was die Erstinbetriebnahme vereinfacht.
- *EtherNet/IP™ ist eine Marke von ODVA.

Konfigurationsbeispiel
| Produktname | Menge | |
|---|---|---|
| Roboter | OVR4048K5-V | 1 |
| Integrierte Robotersteuerung mit Treibern | MRCU4AK | 1 |
| Kabel zwischen Motor und Treiber (3 m) | CCM030Z1EFF | 1 |
| CCM030Z1EFR | 2 | |
| CCM030Z2AAR | 1 | |
| Stromversorgungskabel | CC09MRCU030 | 1 |
- ● Die MRCU-Serie kann auch mittels I/O-Signalen ohne Host-Controller gesteuert werden.
- ● Zusätzlich werden Gleichstromversorgung und Endeffektor benötigt.
- ● Auswahlhilfe zur Bestimmung der Motoranschlusskabel.
Anwendungsbeispiele
Beispiele für 4-Achs Knickarmroboter.
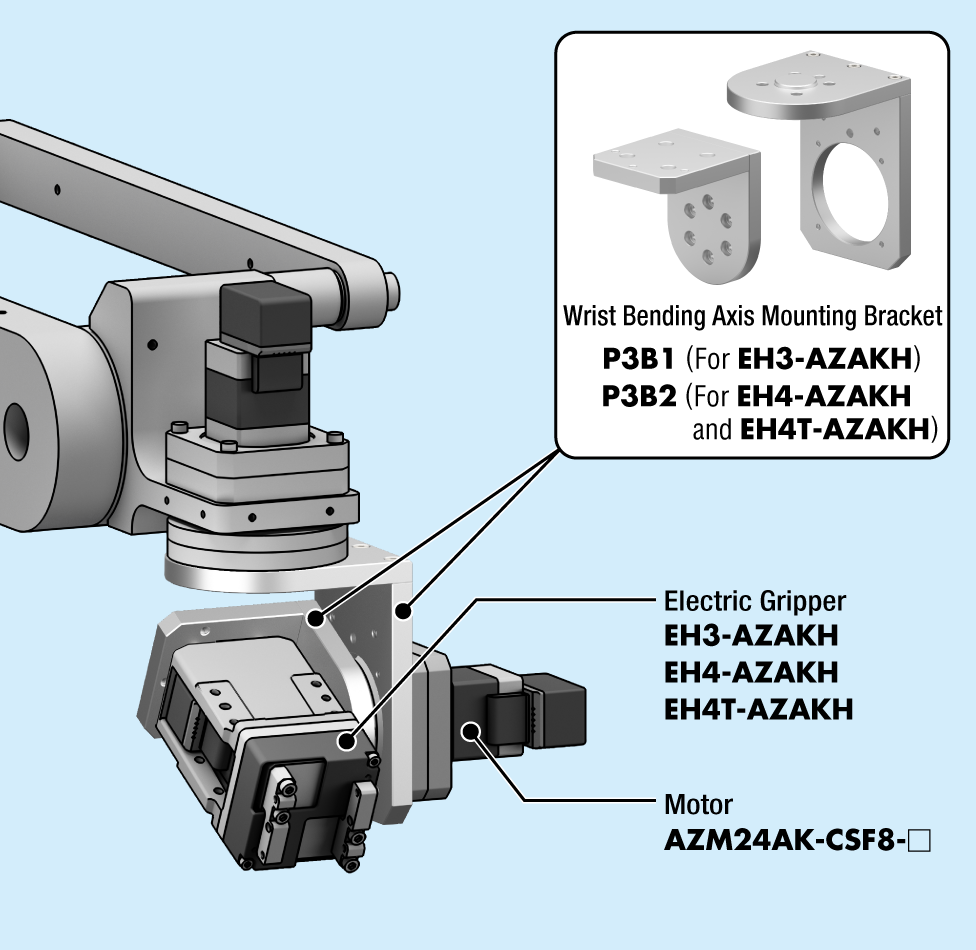
Montagewinkel ermöglicht das Drehen und Neigen eines Endeffektors
Da die Armspitze aufgrund der Parallelogramm-Mechanik immer nach unten zeigt, reichen für eine Pick-and-Place-Anwendung 4 Achsen aus.
Es gibt jedoch viele Fälle, bei denen der Endeffektor drehbar und neigbar sein muss.
Der Montagewinkel hilft dabei, dieses Problem zu lösen.
Anwendungen
- Der elektrische Greifer wird um 90 Grad angehoben, um das Werkstück vom Regal zu greifen und in die Verpackungsbox zu legen.
- Das Werkstück wird aufgenommen, ein Foto der Rückseite wird aufgenommen und es wird verpackt.
- Arbeit mit leicht geneigter Biss- und Brennerposition.