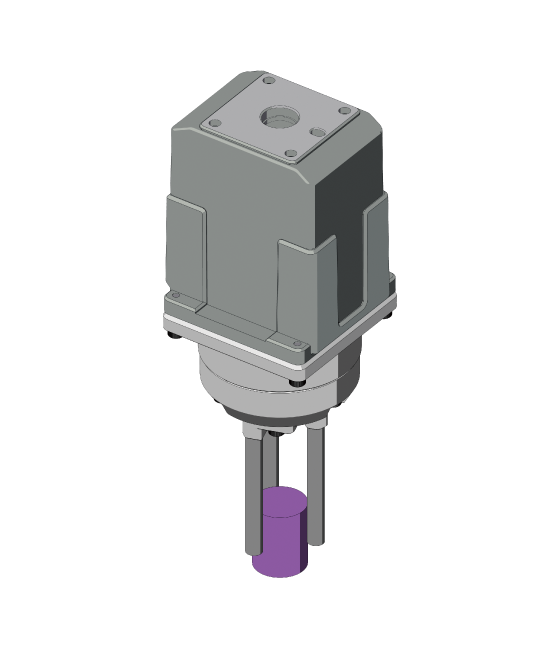
Elektrische Greifer
EH-Serie
- Für sensible Greifanwendungen
- Ausgestattet mit Closed Loop Schrittmotor
- Ausführungen mit 2 bzw. 3 Fingern verfügbar
- Maximale Greifkraft 50 N
Eigenschaften | Elektrische Greifer der EH-Serie mit AZ-Motor
Haupteigenschaften
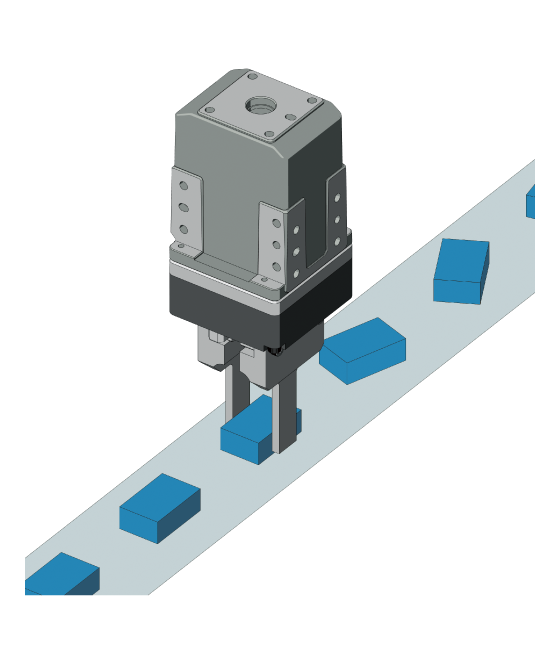
Behutsames Greifen verschiedenster Lasten
Ein feinfühliger Griff wird durch die Feineinstellung der Greifkraft in 1 %-Schritten des Betriebsstroms und eine langsame Annäherung an die Last erreicht.
Greifen
Empfindliche Werkstücke, die beschädigt werden könnten oder sich leicht verformen, können gegriffen werden.
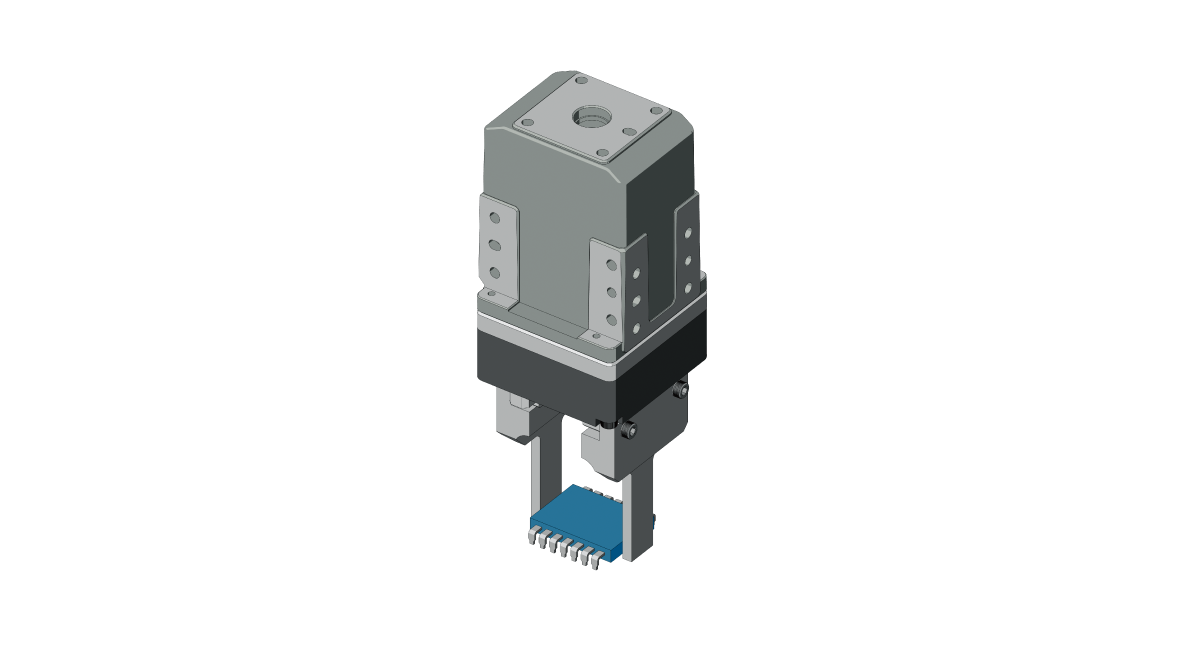
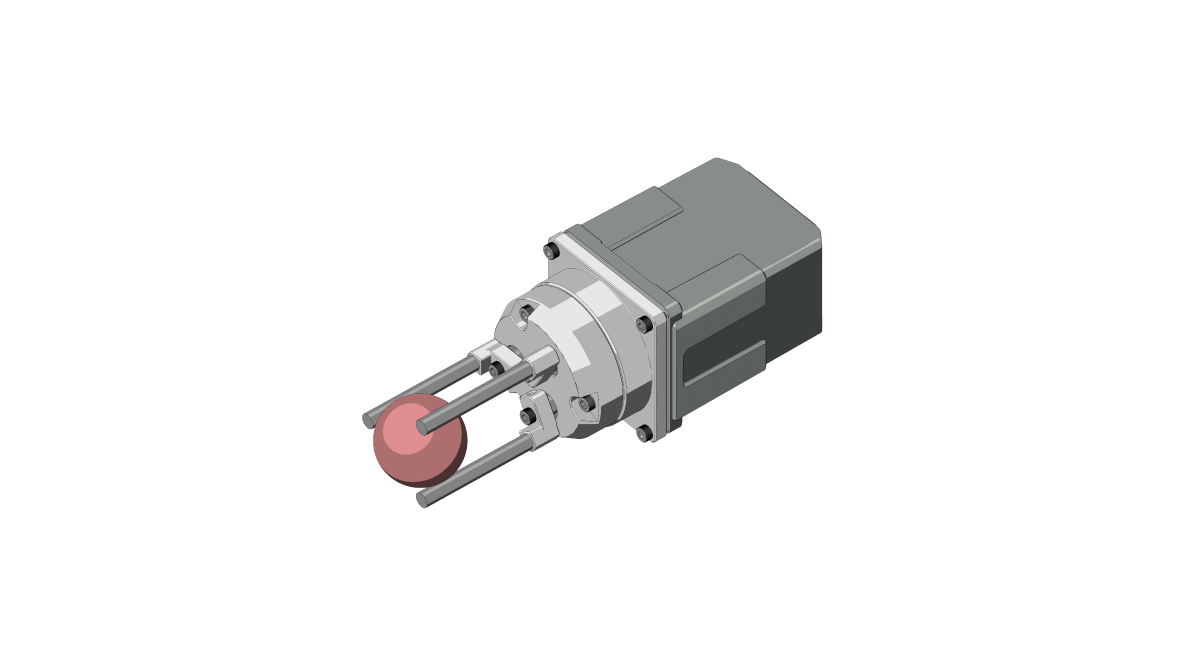
Der 3-Finger-Greifer eignet sich zum Greifen von runden, zylindrischen oder leicht verformbaren Lasten.
Ausrichten
Richtung und Position von Werkstücken können korrigiert werden.
Messen
Die Größe eines Werkstücks kann gemessen werden.
Beim feinfühligen Greifen ist die EH-Serie einem pneumatischen Greifer überlegen.
Die Greifkraft kann in 1-%-Schritten eingestellt werden (2-Finger- und 3-Finger-Greifer)
Die Einstellung mit einem pneumatischen Greiferregler (Druckreduzierventil) entfällt. Die Greifkraft kann einfach und präzise digital vorgegeben werden.
Die Geschwindigkeit kann in 0,02 mm/s-Schritten eingestellt werden (2-Finger-Greifer)
Die Einstellung mit einem pneumatischen Greifer-Drehzahlregler (Drehzahlregelventil) entfällt.
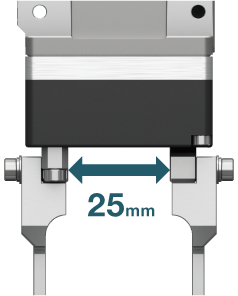
Einstellung des Verfahrwegs in 0,02 mm-Schritten (2-Finger-Greifer)
Der Greifer nutzt die hohe Positioniergenauigkeit des Schrittmotors.
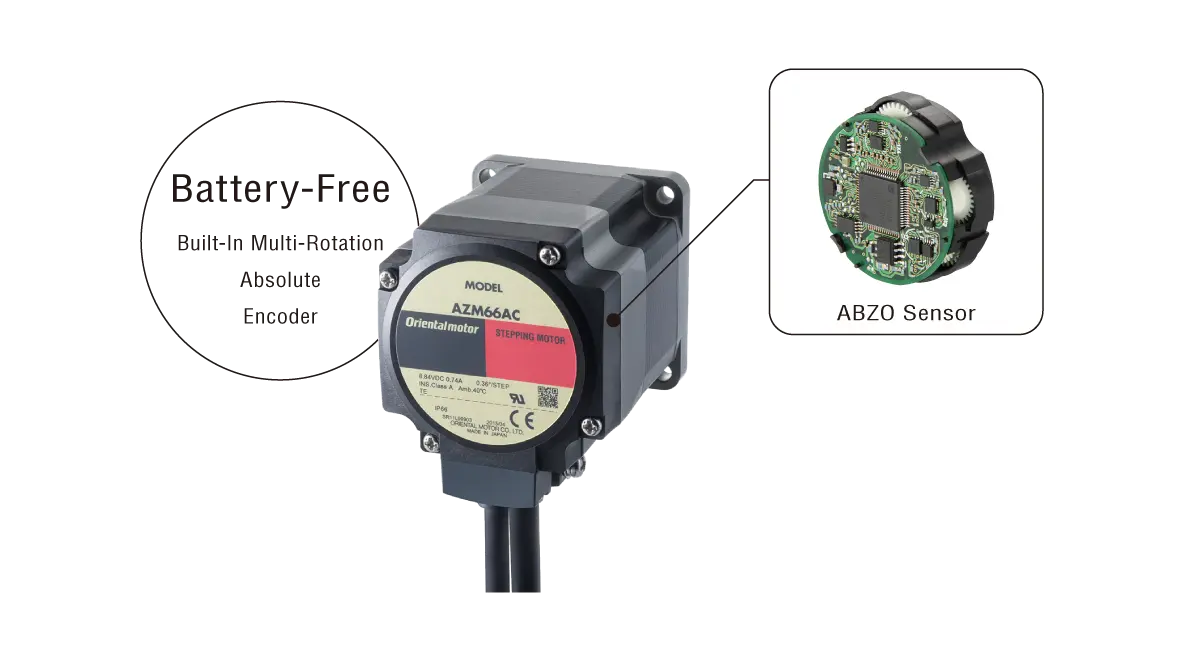
Positionsüberwachung mit einem ABZO-Sensor (2-Finger- und 3-Finger-Greifer)
Detaillierte Positionsinformationen können angezeigt werden. Bei Verwendung des 2-Finger-Greifers können die Positionsinformationen auch zur Vermessung eines Bauteils verwendet werden.
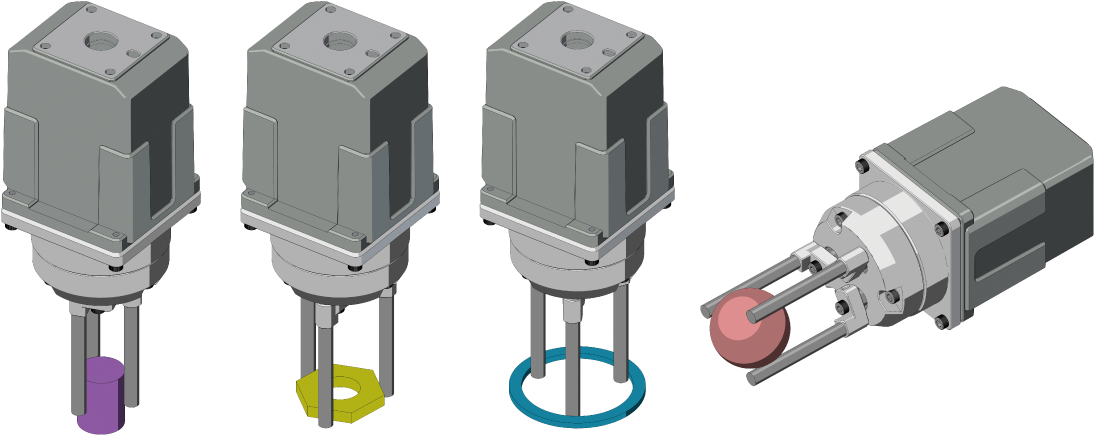
2-Finger-Greifer und 3-Finger-Greifer eignen sich für unterschiedliche Aufgaben
Vergleich von 2-Finger-Greifer und 3-Finger-Greifer
| Version | 2-Finger*1 | 3-Finger | ||
|---|---|---|---|---|
| Greifbare Formen |
|
| ||
| Arbeitsbereich |
 |
 |
 |
|
| Geöffnet: Ø30,9 mm |
Geschlossen: Ø7 mm |
|||
 |
 |
|||
| Öffnungsbereich: Ø23,9 mm |
||||
| Max. Greifkraft [N] | 25 | 50 | ||
| Zulässige Last [N] (Zulässige Axiallast [N]*2) |
5 | 15 | ||
| Gewicht [kg] | 0,38 | 0,38 (mit Montageabdeckung) 0,28 (ohne Montageabdeckung) |
||
- *1
- Spezifikation der Version EH4.
- *2
- Für 3-Finger-Greifer.
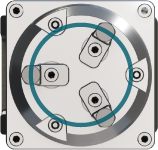
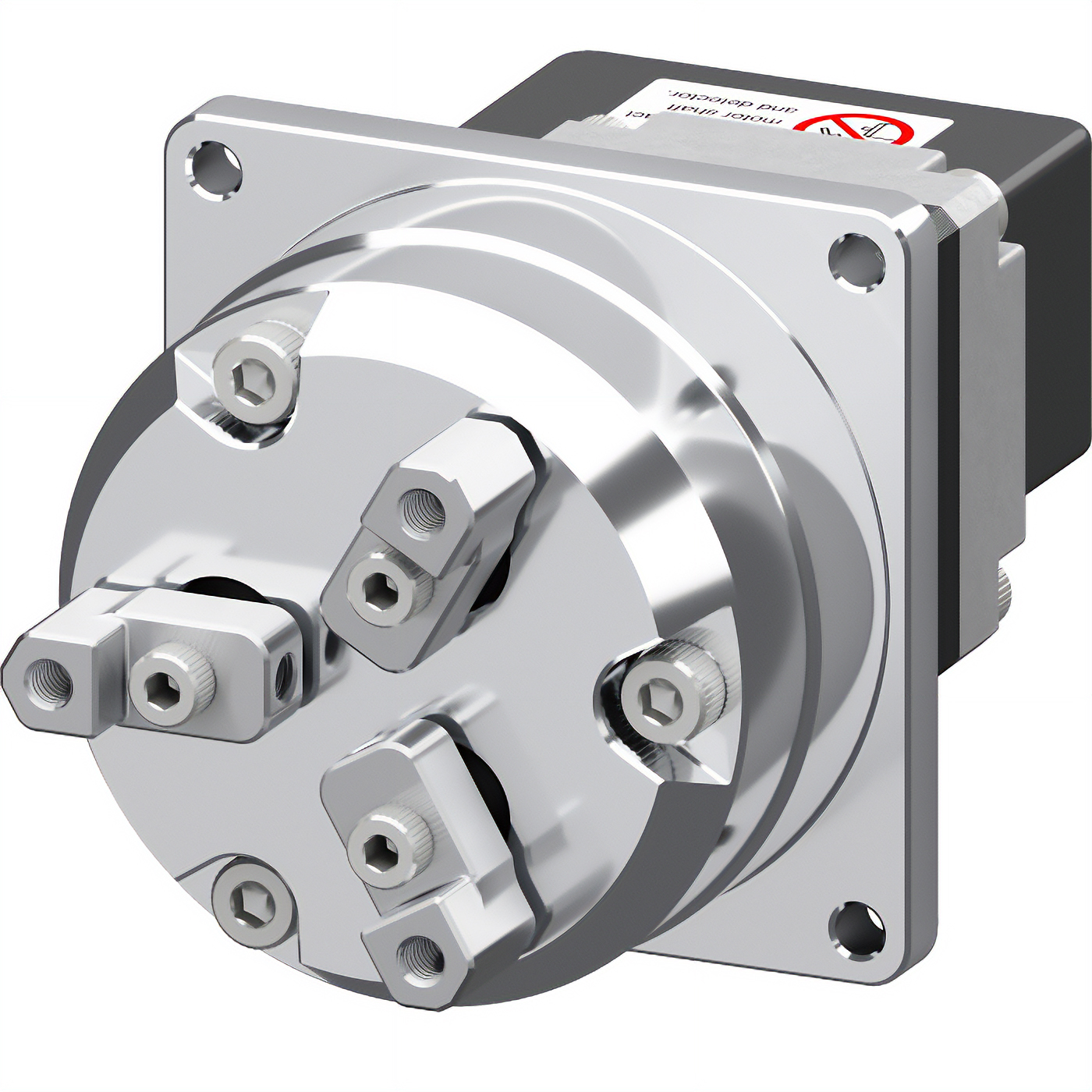
Eigenschaften des 3-Finger-Greifers
- Aufgrund der großen zulässigen Axiallast eignet er sich für Bauteile mit höheren Lasten.
- Durch den exzentrischen Aufbau der Greiferfinger öffnet und schließt sich der 3-Finger-Greifer in einer rotativen Bewegung.
Vorteile der verwendeten AZ-Serie
Ausgestattet mit batterielosem Absolutencoder
Der Motor ist mit einem kleinen batteriefreien mechanischen Absolutencoder (ABZO-Sensor) ausgestattet. Dies kann dazu beitragen, die Produktivität zu steigern und die Kosten zu senken.
- Mechanischer Encoder
Selbst wenn während des Betriebs die Stromversorgung unterbrochen wird, bleiben die Positionsinformationen erhalten. - Multiturn-Absolutencoder
Die Erkennung der Absolutposition ist im Bereich von ±900 Umdrehungen (1.800 Umdrehungen) der Motorwelle möglich.
Externe Sensoren sind nicht erforderlich
Da es sich um ein Absolutsystem handelt, sind Referenzsensoren oder Endschalter nicht erforderlich.
Vorteile
- Verbesserte schnelle Rückfahrt zum Referenzpunkt und Referenziergenauigkeit
- Reduzierte Kosten
- Einfache Verdrahtung
- Keine Beeinträchtigung durch externe Sensorfehlfunktionen
Batterielos
Mechanische Sensoren benötigen keine Batterien.
Die Positionsinformationen werden mechanisch vom ABZO-Sensor verwaltet.
Vorteile
- Batterien müssen nicht ausgetauscht werden
- Flexible Treiberinstallation
- Sicherheit bei weltweiten Lieferungen
Die Sequenzfunktion vereinfacht die Programmierung
Die Positioniervorgänge der AZ-Serie verfügen über eine Vielzahl von Ablauffunktionen, wie z. B. die Einstellung eines Timers zwischen den Vorgängen und Linked Operation, die bedingte Verzweigung und die Loop-Funktion.
Diese Funktionen können mit der Parametrier-Software MEXE02 eingestellt werden, was das Programm der übergeordneten Steuerung vereinfacht.

- Einstellung der Fahrsatzdaten (max. 256)
- I/O-Signale (6 Eingänge, 6 Ausgänge)
- Remote I/O-Signale (16 Eingangbits, 16 Ausgangsbits)
Produktübersicht der Serien mit AZ-Motor
Da die verwendeten Motoren alle AZ-Motoren sind, sind die Betriebs- und Wartungsmethoden einheitlich.
Elektrische Aktuatoren mit Motoren der AZ-Serie
| Elektrische Linearführungen | Elektrische Zylinder | Kompakte Elektrozylinder | Zahnstangensysteme | Elektrische Greifer | Rotierende Aktuatoren mit Hohlwelle |
|---|---|---|---|---|---|
| EZS-Serie | EAC-Serie | DR-Serie DRS2-Serie |
L-Serie | EH-Serie | DGII-Serie |
- Die Aktuatoren sind für unterschiedliche Stromversorgungen verfügbar. Die detaillierte Produktübersicht finden Sie auf der jeweiligen Seite der Serie.
Eigenschaften und Produktübersicht der Treiber
Treiberauswahl passend zur übergeordneten Steuerung
Es sind Produkte für eine Vielzahl von Schnittstellen erhältlich.
| Treiberversion | Schnittstelle | Einzelachs-Treiber | |
|---|---|---|---|
| Für DC-Stromversorgung | |||
 |
|||
| Mit Feldbus | Der Treiber kann direkt vom übergeordneten Steuergerät über Feldbus gesteuert werden. | EtherCAT | ○ |
| EtherNet/IP™ | ○ | ||
| PROFINET | ○ | ||
| Mit integriertem Controller | Fahrsätze können im Treiber gespeichert werden. Ansteuerbar mit Modbus (RTU) und I/O. | Modbus (RTU) I/O |
○ |
| Mit Takteingang und RS-485-Schnittstelle | Steuerung mit Taktsignalen. Statusinformationen des Motors können über die RS-485-Schnittstelle überwacht werden. | Mit Takteingang Modbus (RTU) |
○ |
| Mit Takteingang | Steuerung mit Taktsignalen | Mit Takteingang | ○ |
- mini-Treiber und Multi-Achs-Treiber für DC-Stromversorgung sind ebenso erhältlich.
Einfacher Betrieb vom PC mit der Parametrier-Software MEXE02
Mit der Parametrier-Software MEXE02 können Fahrsatzdaten und verschiedene Parameter eingestellt, Positionen geteacht und Antriebe überwacht werden.
Hier klicken, um die Parametrier-Software herunterzuladen
Umfassende Unterstützung durch eine Vielzahl von Funktionen der Software vom Start bis zur Wartung
-
Inbetriebnahme und Test
Nützliche Funktionen für die Verdrahtungsprüfung und eine Testfunktion sind vorhanden.
- Einstellen und Speichern von Fahrsatzdaten
- I/O-Test
- Teaching, Remote Operation
-
Optimierung
Die folgenden Funktionen helfen bei der Optimierung der Fahrsatzdaten nach der Inbetriebnahme des Antriebs.
- Waveform Monitor
-
Diagnose und Wartung
Diagnose- und Wartungsfunktionen stehen für die Fehlerdiagnose und Wartung während des Betriebs zur Verfügung.
- Alarm Monitor
- Unit Information Monitor
- Status Monitor
-
„Operation Data/Parameter Setting“ -
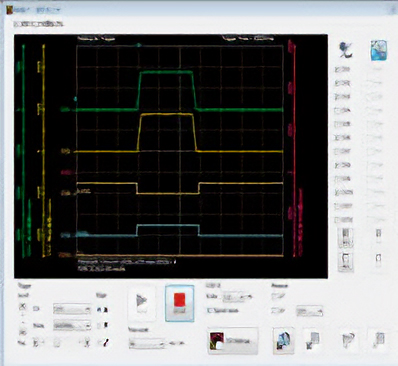
Waveform Monitor
Hier klicken, um Details zu Funktionen der Parametrier-Software zu erhalten
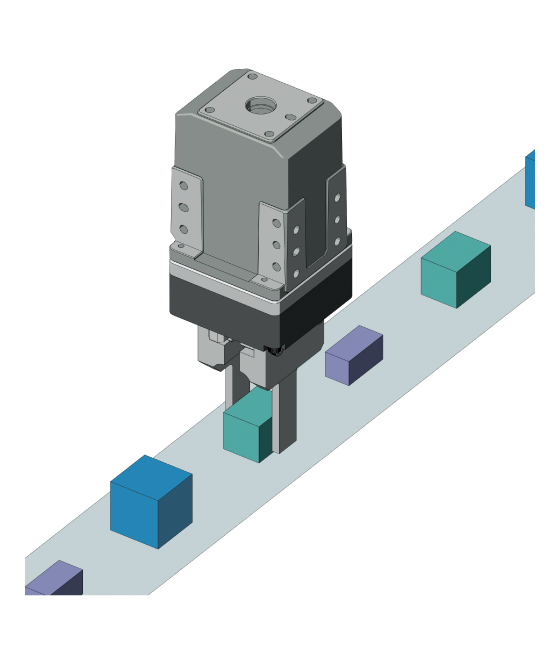
Anwendungen
Die Verwendung des kompakten und leichten EH-Greifers als Endeffektor reduziert die Belastung der anderen Antriebsachsen. Dies trägt auch zur Reduzierung von Taktzeit und Anlagengröße bei.
Verwendung als Endeffektor für Roboter
Für Knickarmroboter

Für kartesische Roboter

| EH3-AZAKH | EH4-AZAKH | EH4T-AZAK |
|---|---|---|
 |
 |
 |
| B 42,5 mm × T 80,5 mm × H 36 mm | W 48,5 mm × D 91 mm × H 46 mm | W 47 mm × D 90,5 mm × H 46 mm |
| Gewicht: 200 g | Gewicht: 380 g | Gewicht: 280 g |
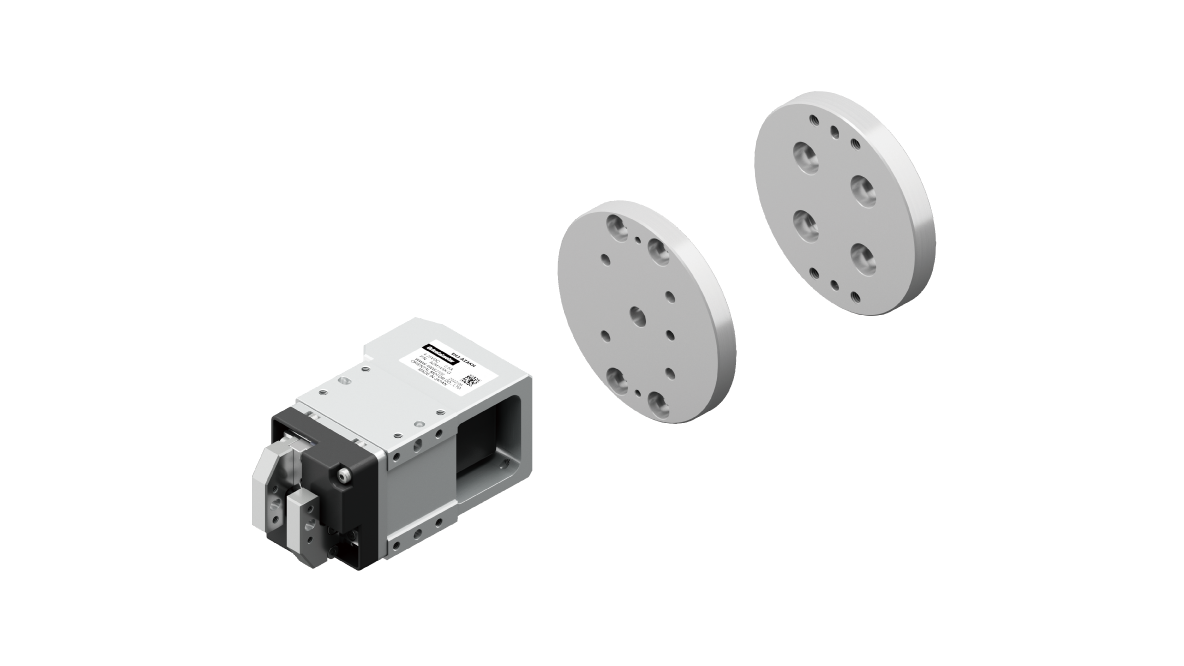
Einfache Installation an handelsübliche Industrieroboter
Flansche sind für die Installation der EH-Serie an handelsübliche Industrieroboter (Cobots) erhältlich.
Flansche auf der Roboterseite entsprechen ISO 9409-1 (JIS 8436).

Verwandte Produkte
mini-Treiber der AZ-Serie für DC-Stromversorgung
mini-Treiber, kompakter und leichter als ein Standard-Treiber. Unterstützt den Batteriebetrieb und erweitert damit das Spektrum der möglichen Anwendungen.

Produkte eingrenzen
Download
Katalog

EH-Serie
Elektrische Greifer
Bedienungsanleitung
Parametrier-Software

Produktübersicht und Zusatzinformationen
Technische Daten (Wärmeentwicklung bei Treibern)
Technische Daten (Einschaltstrom)