2-Phasen Schrittmotoren
PKP/PK-Serie

- Hohes Drehmoment, vibrationsarm
- Flanschmaß: 13-90 mm
- Ausführungen mit Getriebe, Encoder oder elektromagnetischer Bremse sind verfügbar
Der Motor mit Flanschmaß 13 mm ist nun auch in der Ausführung mit Harmonic-Getriebe verfügbar.
Hier klicken für Details der Version Flanschmaß 13 mm mit Harmonic-Getriebe
Eigenschaften | 2-Phasen-Schrittmotoren der PKP/PK-Serie
Verbesserte Leistung
Höheres Drehmoment
Durch die effizienteren Motorwicklungen sind höhere Ströme möglich. Dadurch wird im gesamten Drehzahlbereich ein höheres Drehmoment erreicht.
Vergleich zweier Motoren gleicher Baugröße mit unterschiedlicher Wicklung

Vergleich des maximalen Haltemoments

Gleiche Leistung bei reduzierter Stromaufnahme
Auch bei reduziertem Phasenstrom kann das Drehmoment des herkömmlichen Produkts erreicht werden. Dies senkt den Energieverbrauch und reduziert die CO2-Emissionen.
Der Energieverbrauch und die CO2-Emissionen sind im Vergleich zum herkömmlichen Produkt um 56 % reduziert.

| Drehzahl | 0,1 kHz (30 U/min) |
|---|---|
| Betriebsdauer | 24 Stunden am Tag, 365 Tage im Jahr |
| Betriebsbedingungen | 50 % Betrieb, 50 % Stand-by |
| Versorgungsspannung | 24 VDC |
| CO2-Koeffizient | 0,519 kg-CO2/kWh |
Geringe Vibration
Durch die Überarbeitung des Magnetdesigns konnten die Vibrationen verringert werden.

Platzeinsparung durch Downsizing
Aufgrund des erheblich verbesserten Drehmoments der Motoren kann eventuell eine geringere Baugröße ausgewählt werden, ohne ein geringeres Drehmoment in Kauf nehmen zu müssen. Dies hilft, Platz zu sparen und das Gewicht der Anlage zu reduzieren.
44 % Platzeinsparung

| Produktname | PK264-02A | PKP244U12A2 |
|---|---|---|
| Maximales Haltemoment (Nm) |
0,39 | 0,39 |
| Flanschmaß (mm) |
56,4 | 42 |
| Gewicht (kg) | 0,45 | 0,3 |
Kompakter und flacher Stecker
Die PKP-Serie verwendet überwiegend einen kompakten und flachen Stecker, der den Überstand des Steckers reduziert. Der senkrechte Kabelabgang ermöglicht mehr Flexibilität beim Einbau des Motors.
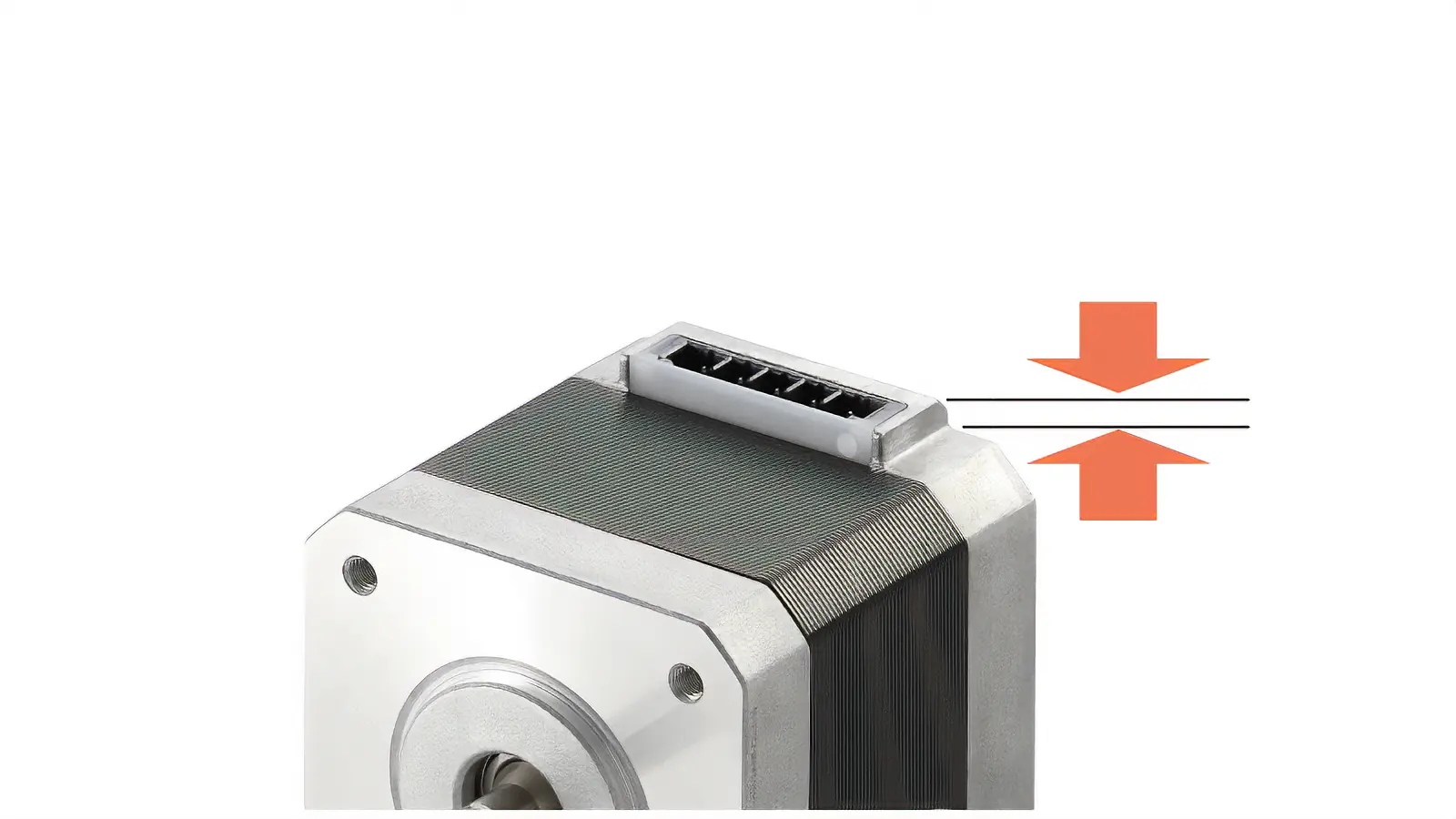
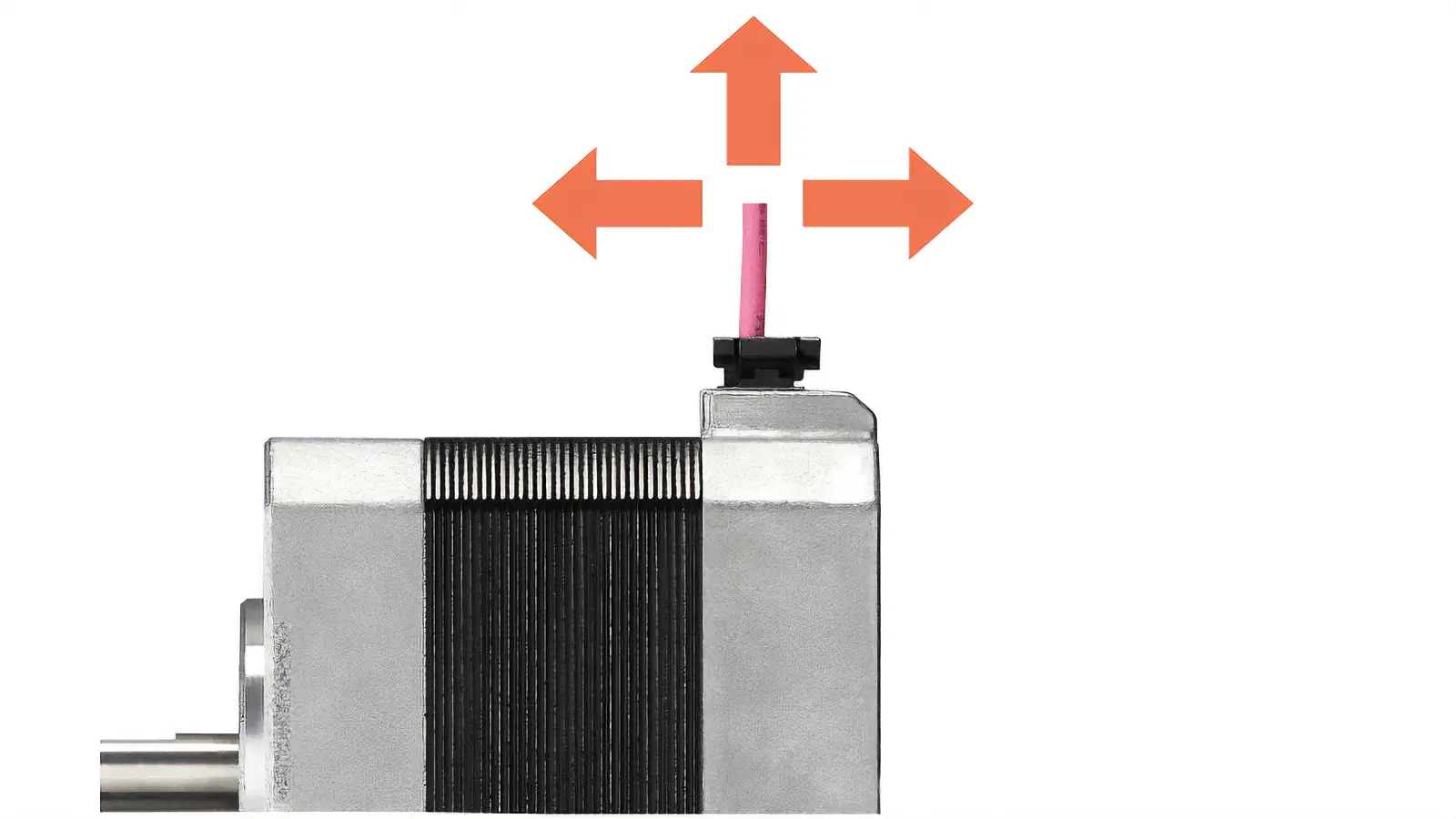
- *Details siehe Abmessungen der einzelnen Motoren.
Mit Encoder
Es sind auch Modelle mit Encoder verfügbar. Durch den Vergleich von Ist- und Sollposition kann der Normalbetrieb des Motors überprüft werden.

Wesentliche Encoder-Spezifikationen
| Version | Standard | Version mit hoher Auflösung Mit SH-Getriebe |
|---|---|---|
| Auflösung | 200 P/R, 400 P/R 1000 P/R* |
400P/R |
| Winkelgenauigkeit | ±0,36° (Wert an der Motorabtriebswelle) | |
| Ausgangssignale | 3 Kanäle: A, B, Z | |
- *Die Standardversion mit Flanschmaß 42 mm und 56,4 mm ist auch mit einer Auflösung von 1000 P/R erhältlich. Hier klicken, um weitere Informationen zu Produkten zu erhalten
Winkelgenauigkeit
Der Fehler zwischen dem tatsächlichen Drehwinkel und dem vom Encoder ausgegebenen Winkel.

Ermöglicht eine genauere Systemsteuerung
Die aktuelle Position kann überwacht und Positionsfehler können erkannt werden.
Durch den Vergleich der Ist- mit der Sollposition kann der Normalbetrieb des Motors überprüft werden.
Beispiel einer Systemkonfiguration

- *An der Motorabtriebswelle
Hochgradig reproduzierbare Referenzierung
Da das Z-Signal am Erregerursprung (stabiler Punkt) immer zusammen mit einem TIM-Signal* ausgegeben wird, können sie gemeinsam als Ersatz für einen Referenzsensor (ein an der Motorwelle angebrachter Sensor, der den Referenzpunkt innerhalb einer Umdrehung erkennt) verwendet werden.
Das TIM-Ausgangssignal* verbessert die Reproduzierbarkeit der Referenzposition.
- *Das TIM-Signal wird 50 mal je Rotorumdrehung mit einem Abstand von 7,2° (3,6° für Versionen mit hoher Auflösung) ausgegeben.
Wenn das Z-Phasen-Timing festgelegt ist
Neuer magnetischer Encoder

It outputs Z-phase signals with a width of ±3.6° centered on the step "0" position (stable point).
Wenn das Z-Phasen-Timing nicht festgelegt ist

Das Timing zwischen Z-Signal und TIM-Singal ist undefiniert, was die Verwendung als Ersatz für einen Referenzsensor erschwert.
Mit kompaktem Encoder
Bei einem Flanschmaß von 56,4 mm
- *Der Encoder ist in der Zeichnung orange dargestellt.

Mit Spannungsausgang oder Line Driver
Versionen mit Spannungsausgang oder Line Driver stehen zur Verfügung.
Passende Encoderkabel sind separat erhältlich.
Motorvarianten
| Getriebe | Motor | Flanschmaß [mm] |
Basisschrittwinkel [°] |
Anschluss | Optionen |
|---|---|---|---|---|---|
| Kein Getriebe |

|
13-85 | 1,8 | Bipolar, Unipolar |
Encoder, Elektromagnetische Bremse |
|
|
28-56,4 | 0,9 | Bipolar, Unipolar |
Encoder, Elektromagnetische Bremse |
|

|
42, 60 | 1,8 | Bipolar | Encoder | |
| Mit Getriebe |
SH-Stirnradgetriebe 
|
28-90 | 0,05-0,5 | Bipolar, Unipolar |
Encoder |
|
CS-Stirnradgetriebe 
|
28-60 | 0,09-0,36 | Bipolar, Unipolar |
Keine | |
|
Harmonic-Getriebe 
|
13 | -0,018-0,06 | Bipolar | Keine | |
|
Flache Version mit Harmonic-Getriebe 
|
51, 61 | 0,018-0,036 | Bipolar | Encoder |
Linearaktuator mit Montageadapter (separat erhältlich)

- Linearbewegung durch Montage an einen Schrittmotor
- Gewindespindel mit abriebfester Kunststoffmutter
- Flanschmaß 30/42 mm, Hub 50-300 mm.
- Max. Schubkraft und zur Überwindung der Selbsthemmung erforderliche Kraft: Maximal 100 N (Flanschmaß: 42 mm)
Drehgeber (separat erhältlich)
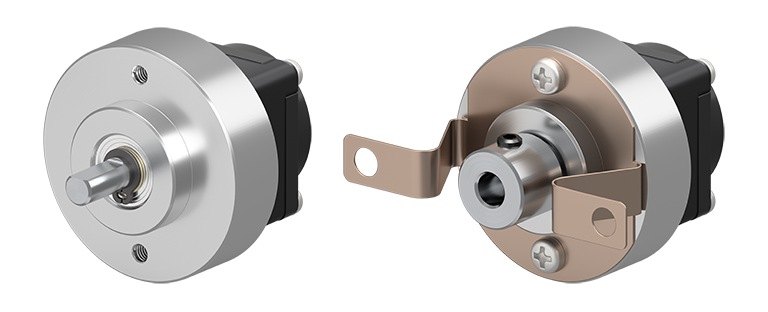
- Kleine, dünne und leichte inkrementale Encoder
- Auflösung: 100-4000 P/R (14 Versionen)
- Line Driver-Ausgang, Spannungsausgang, Open-Collector-Ausgang
- Einfache Ausrichtung der Referenzposition zum Z-Signal
Verwandte Produkte
Passende Treiber (separat erhältlich)
Treiber für 2-Phasen-Schrittmotoren
Bipolarer Treiber
CVD-Serie mit Takteingang/mit RS-485-Schnittstelle
Mit rechtwinkliger Stiftleiste und Montageplatte
Die Stiftleiste zeigt nach außen.

Mit senkrechter Stiftleiste und Montageplatte
Die Stiftleiste zeigt nach oben.
Ohne Montageplatte
Die Stiftleiste zeigt nach oben.
- *Das Foto zeigt die Version mit Takteingang. Die Version mit RS-485-Schnittstelle ist nicht ohne Montageplatte verfügbar.
Bipolarer Treiber
S-Version der CVD-Serie
Kompakte Treiber als Steckmodul zur Ansteuerung mit SPI-Kommunikation bzw. mit Takteingang

2-Phasen bzw. 5-Phasen Schrittmotortreiber
Multi-Achs-Treiber mit EtherCAT Schnittstelle der CVD-Serie
4-Achs-Treiber, die eine Ansteuerung von 2-Phasen-/5-Phasen-Schrittmotoren mit EtherCAT-Kommunikation ermöglichen. Alle Informationen der Motoren, der Encoder oder externen Sensoren werden auf diesem Treiber zentral erfasst und über EtherCAT-Kommunikation zum EtherCAT-Master weitergeleitet.

Einführung in die Kombinationen von Schrittmotoren und Treibern

Schrittmotoren der PKP-Serie /Treiber der CVD-Serie mit Takteingang
Einfacher Betrieb eines Schrittmotors über einen Takteingang.
Schrittmotoren der PKP-Serie/ Treiber der CVD-Serie mit RS-485-Schnittstelle
Betrieb eines Schrittmotors mit Modbus (RTU). Die Parameter können z. B. einfach über einen Touchscreen erstellt werden. Bis zu 31 Achsen können von einem einzigen Host-Controller gesteuert werden.
Produkte eingrenzen



