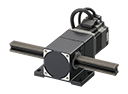
Zahnstangensysteme
L-Serie
Ausgestattet mit der αSTEP AZ-Serie

- Schrittmotor mit Zahnstangenmechanismus
- Ausgestattet mit Closed Loop Schrittmotor
- Hub 100–1000 mm
- Maximale Transportlast 100 kg
Eigenschaften | Zahnstangensysteme der L-Serie
Haupteigenschaften
Kompakte Größe, maximale Transportlast 100 kg
Maximale Transportlast 100 kg
Ein Ritzel mit großem Durchmesser und eine hohe Getriebefestigkeit ermöglicht eine maximale Transportlast von 100 kg.
Maximaler Hub 1000 mm
Die Produktlinie umfasst Hübe von 100 bis 1000 mm.

Vergleich mit elektrischen Linearführungen
Unter der Voraussetzung, dass Kippmomente von einer externen Führung aufgenommen werden, kann das Zahnstangensystem Lasten transportieren.


Aufbau des Zahnstangensystems
Mit einem Zahnstangensystem kann die Rotation eines Motors einfach in eine lineare Bewegung umgewandelt werden.
Das Zahnstangengetriebe kann trotz kompakter Bauform aufgrund seiner hohen Festigkeit große Lasten transportieren.

Aspekte der effizienten Konstruktion
Verkürzung der Inbetriebnahmezeit
Das Zahnstangensystem reduziert die Anzahl der überlicherweise verwendeten Komponenten und verringert so die für Konstruktion und Montage erforderlichen Arbeitsstunden erheblich.
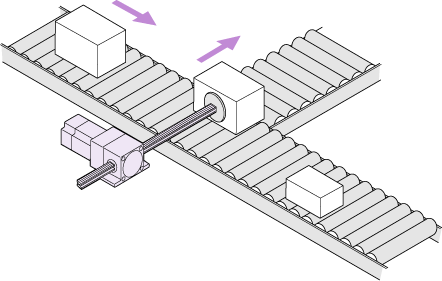
Platzeinsparung
Durch Fixierung der Zahnstange an beiden Enden wird der Motor zum selbstfahrenden System. Dies ist hilfreich, wenn nur ein begrenzter Bauraum zur Verfügung steht und der Motor nicht extern montiert werden kann.


Voreingestellte Parameter
Es wird ein Motor der αSTEP AZ-Serie verwendet.
In der Parametriersoftware MEXE02 kann der Verfahrweg in "mm" eingestellt werden.

Minimaler Verfahrweg
| Version mit hoher Geschwindigkeit | Version mit großer Transportlast |
|---|---|
| 0,01 mm | 0,001 mm |
Geschwindigkeit (Version für AC-Stromversorgung)
| Version mit hoher Geschwindigkeit | Version mit großer Transportlast | |
|---|---|---|
| Rahmengröße 60 mm | Rahmengröße 80 mm | |
| 0–500 mm/s | 0–90 mm/s | 0–40 mm/s |
Anwendungen
Das Zahnstangensystem ist vielseitig einsetzbar, benutzerfreundlich und kann als ein gesamtes Bauteil ausgewählt werden.
| Bewegungsrichtung der Zahnstange | Fixierter Motor | Fixierte Zahnstange |
|---|---|---|
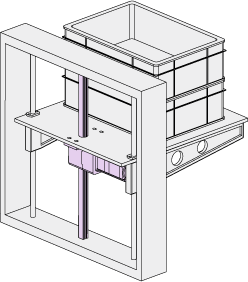
Parallel zur Montagefläche (Version B)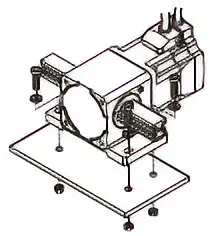 |
Einfaches Bewegen von Bauteilen durch Schieben oder Ziehen. |
Verschiedene Hublängen und Geschwindigkeiten sind verfügbar. |
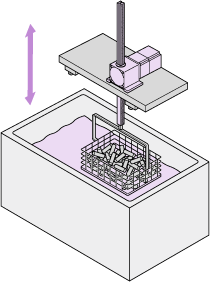
Vertikal zur Montagefläche (Version F)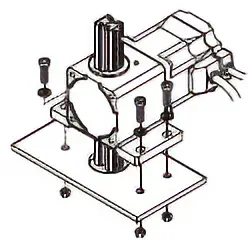 |
Einfacher vertikaler Betrieb. Eine elektromagnetische Bremse zur Absturzsicherung ist optional verfügbar. |
Die Fixierung der Zahnstange an beiden Enden vereinfacht die Befestigung von Lasten. |
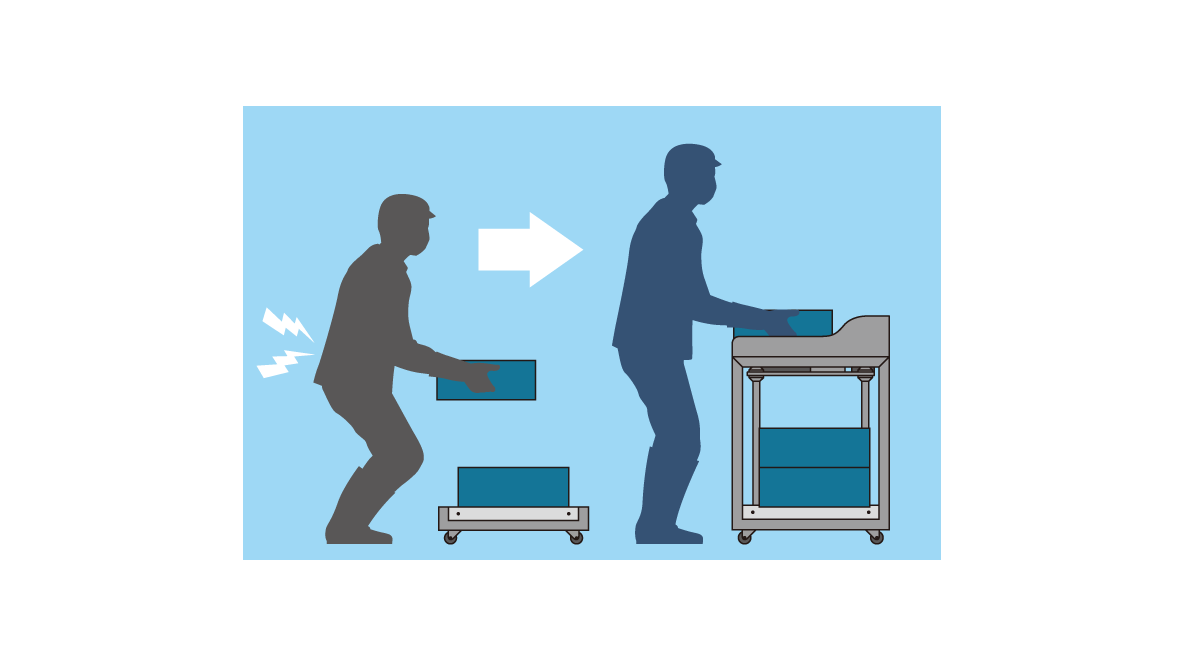
Arbeitserleichterung
In vielen Firmen herrscht durch die demographische Entwicklung ein Mangel an Arbeitskräften. Vor diesem Hintergrund besteht ein dringender Bedarf an Arbeitserleichterungen, die die Belastung durch schwere Hebearbeiten und sich wiederholende Arbeiten wie Sortieren reduzieren. Zahnstangensysteme können hohe Lasten transportieren und tragen deshalb zur Reduzierung der Arbeitsbelastung bei.
Arbeitserleichterung mit Hilfe eines Zahnstangensystems
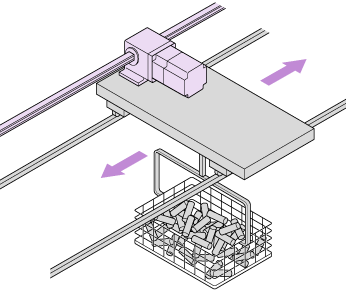
Anwendungsbeispiel für die L-Serie (Demogerät für automatisierte Hebevorrichtung)
Oriental Motor hat ein Demogerät für eine automatisierte Hebevorrichtung für den Einsatz auf Messen konstruiert. Mit einem einfachen Mechanismus lassen sich schwere Gegenstände mit einem Gewicht von bis zu 100 kg anheben und absenken. Weitere Informationen zur Hebevorrichtung werden im Video gezeigt.
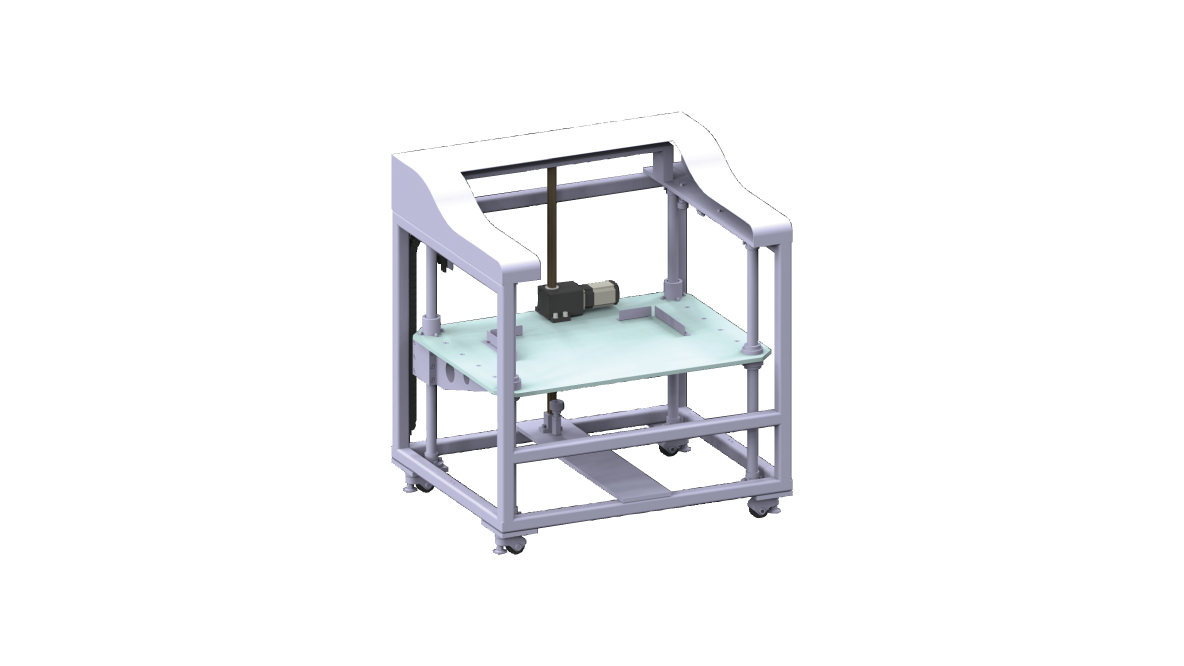
Transportlast: 100 kg (bei 20 mm/s)
Hub: 600 mm
Demogerät des Zahnstangensystems der L-Serie
Übersicht über die Komponenten des Demogeräts
| Produktname | ||
|---|---|---|
| L-Serie Version F |  |
LM4F40AZMC-6 |
| Treiber mit integriertem Controller | AZD-AD | |
| Flexibles Anschlusskabel | Für den Motor | CC020VZR-M |
| Für den Encoder | CC020VNR-E2 | |
| Für die elektromagnetische Bremse | CC020VNR-E2 |
Vorteile der verwendeten AZ-Serie
Ausgestattet mit batterielosem Absolutencoder
Der Motor ist mit einem kleinen batteriefreien mechanischen Absolutencoder (ABZO-Sensor) ausgestattet. Dies kann dazu beitragen, die Produktivität zu steigern und die Kosten zu senken.
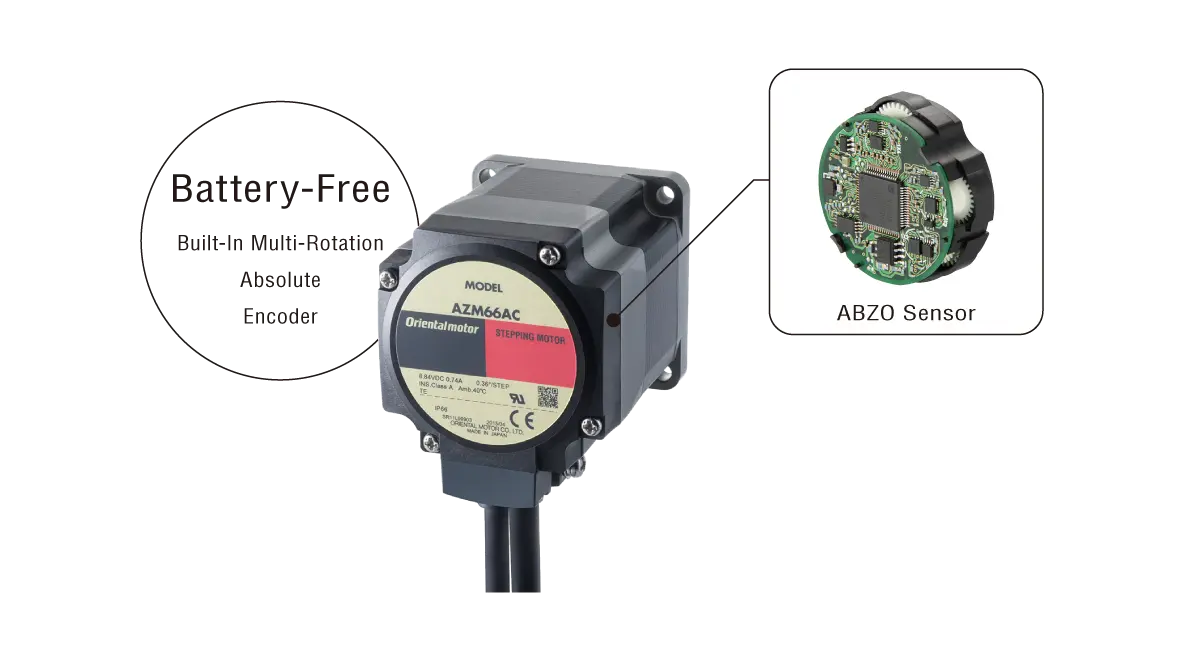
- Mechanischer Encoder
Selbst wenn während des Betriebs die Stromversorgung unterbrochen wird, bleiben die Positionsinformationen erhalten. - Multiturn-Absolutencoder
Die Erkennung der Absolutposition ist im Bereich von ±900 Umdrehungen (1.800 Umdrehungen) der Motorwelle möglich.
Externe Sensoren sind nicht erforderlich
Da es sich um ein Absolutsystem handelt, sind Referenzsensoren oder Endschalter nicht erforderlich.
Vorteile
- Verbesserte schnelle Rückfahrt zum Referenzpunkt und Referenziergenauigkeit
- Reduzierte Kosten
- Einfache Verdrahtung
- Keine Beeinträchtigung durch externe Sensorfehlfunktionen
Batterielos
Mechanische Sensoren benötigen keine Batterien.
Die Positionsinformationen werden mechanisch vom ABZO-Sensor verwaltet.
Vorteile
- Batterien müssen nicht ausgetauscht werden
- Flexible Treiberinstallation
- Sicherheit bei weltweiten Lieferungen
Die Sequenzfunktion vereinfacht die Programmierung
Die Positioniervorgänge der AZ-Serie verfügen über eine Vielzahl von Ablauffunktionen, wie z. B. die Einstellung eines Timers zwischen den Vorgängen und Linked Operation, die bedingte Verzweigung und die Loop-Funktion.
Diese Funktionen können mit der Parametrier-Software MEXE02 eingestellt werden, was das Programm der übergeordneten Steuerung vereinfacht.

- Einstellung der Fahrsatzdaten (max. 256)
- I/O-Signale (6 Eingänge, 6 Ausgänge)
- Remote I/O-Signale (16 Eingangbits, 16 Ausgangsbits)
Keine Referenzfahrt erforderlich (Version mit integriertem Controller)
Auch beim Ausfall der Stromversorgung während eines Positioniervorgangs bleiben die Positionsinformationen erhalten. Auch nach Wiederaufnahme des Betriebs nach einem Notstopp kann ein laufender Maschinenzyklus ohne Rückfahrt zum Referenzpunkt direkt fortgesetzt werden.

Erfassung des Betriebsstatus und nützliche Funktionen für die vorbeugende und vorausschauende Wartung
Die Software verfügt über verschiedenen Monitorfunktionen zur Überprüfung des Betriebsstatus des Antriebs.
Durch den Einsatz verschiedener Monitoransichten für unterschiedliche Situationen ist es möglich, den Zeitaufwand für die Inbetriebnahme der Anlage zu verkürzen. Sie können auch für Wartung und Instandhaltung genutzt werden.
Monitorfunktion zur Visualisierung des Betriebsstatus und Hilfe bei der Datenerfassung
Mit dem in die AZ-Serie integrierten ABZO-Sensor kann der Betriebsstatus des Motors sehr detailliert überwacht werden.
[Überwachung mit der Parametrier-Software MEXE02]

Darüber hinaus können die Versionen mit integriertem Controller die erfassten Daten mittels Feldbus an einen Host-Master übertragen werden.
Nützliche Informationen für die vorbeugende und vorausschauende Wartung
Durch die Vorgabe von individuellen Grenzwerten für die zu überwachenden Parameter können externe Signale ausgegeben werden, wenn diese Grenzwerte erreicht werden.
Das Übertragen dieser Informationen an einen Host-Controller hilft bei der frühzeitigen Erkennung von Problemen und der Anpassung der Wartungsintervalle.
Beispiele für Informationen
TRIP-Information
Ein Sollwert für die Anzahl der Umdrehungen kann vorgegeben werden. Beim Erreichen des Sollwerts wird das Informationsbit gesetzt. (Motorbetrieb wird fortgesetzt)

Temperaturinformation
Ein Sollwert für die Motortemperatur kann vorgegeben werden. Beim Erreichen des Sollwerts wird das Informationsbit gesetzt. (Motorbetrieb wird fortgesetzt)

Einheitliche Kabel, Treiber und Ersatzteile
Zahlreiche mit der αSTEP AZ-Serie ausgestattete Aktuatoren sind erhältlich.
Sie benutzen einheitliche Motoren und Treiber und vereinfachen dadurch die Verdrahtung, Steuerung und Ersatzteilhaltung.
Einheitliche Kabel
Die Anschlusskabel für Motor, I/O-Signale und Stromversorgung sind einheitlich.
Einheitliche Treiber
Die Ansteuerung ist unabhängig vom angeschlossenen Aktuator und richtet sich nach der Version des Treibers. Bei der Ansteuerung über Feldbus sind die Adressen für Remote-I/O und alle anderen Befehle identisch. Das vereinfacht die Programmierung.
Ersatzteile
Die Ersatzteilhaltung kann minimiert werden, da Motor, Treiber und Kabel einheitlich sind. Die Lagerhaltungskosten (Teilekosten, Lagerfläche) können reduziert werden.
Produktübersicht der Aktuatoren mit Motoren der AZ-Serie
Elektrische Aktuatoren (mit AZ-Serie ausgestattet)
| Elektrische Linearführungen | Elektrische Zylinder | Kompakte Elektrozylinder | Zahnstangensysteme | Elektrische Greifer | Rotierende Aktuatoren mit Hohlwelle |
|---|---|---|---|---|---|
| EZS-Serie | EAC-Serie | DR-Serie DRS2-Serie |
L-Serie | EH-Serie | DGII-Serie |
- Die Aktuatoren sind für unterschiedliche Stromversorgungen verfügbar. Die detaillierte Produktübersicht finden Sie auf der jeweiligen Seite der Serie.
Eigenschaften und Produktübersicht der Treiber
Treiberauswahl passend zur übergeordneten Steuerung
| Treiberversion | Schnittstelle | Einzelachs-Treiber | ||
|---|---|---|---|---|
| Für AC-Stromversorgung | Für DC-Stromversorgung | |||

|

|
|||
| Mit Feldbus-Schnittstelle | Der Treiber kann direkt vom übergeordneten Steuergerät über Feldbus gesteuert werden. | EtherCAT | ○ | ○ |
| EtherNet/IP™ | ○ | ○ | ||
| PROFINET | ○ | ○ | ||
| Mit integriertem Controller | Fahrsätze können im Treiber gespeichert werden. Steuerung über Modbus (RTU) und I/O. |
Modbus (RTU) I/O |
○ | ○ |
| Mit Takteingang und RS-485-Schnittstelle | Position, Geschwindigkeit, Drehmoment, Alarm und Temperatur des Motors können über die RS-485-Schnittstelle überwacht werden. | Takteingang Modbus (RTU) |
○ | ○ |
| Mit Takteingang | Die Steuerung des Motors erfolgt über ein Positioniermodul (Taktgeber). | Takteingang | ○ | ○ |
- mini-Treiber und Multi-Achs-Treiber für DC-Stromversorgung sind ebenfalls erhältlich.
Einfacher Betrieb vom PC mit der Parametrier-Software MEXE02
Mit der Parametrier-Software MEXE02 können Fahrsatzdaten und verschiedene Parameter eingestellt, Positionen geteacht und Antriebe überwacht werden.
Hier klicken, um die Parametrier-Software herunterzuladen
Umfassende Unterstützung durch eine Vielzahl von Funktionen der Software vom Start bis zur Wartung
-
Inbetriebnahme und Test
Nützliche Funktionen für die Verdrahtungsprüfung und eine Testfunktion sind vorhanden.
- Einstellen und Speichern von Fahrsatzdaten
- I/O-Test
- Teaching, Remote Operation
-
Optimierung
Die folgenden Funktionen helfen bei der Optimierung der Fahrsatzdaten nach der Inbetriebnahme des Antriebs.
- Waveform Monitor
-
Diagnose und Wartung
Diagnose- und Wartungsfunktionen stehen für die Fehlerdiagnose und Wartung während des Betriebs zur Verfügung.
- Alarm Monitor
- Unit Information Monitor
- Status Monitor
-
„Operation Data/Parameter Setting“ -
Waveform Monitor
Hier klicken, um Details zu Funktionen der Parametrier-Software zu erhalten
Produktübersicht
Motor mit Zahnstange, Treiber und Anschlusskabel müssen separat bestellt werden.
L-Serie mit Motoren der AZ-Serie
| Bewegungsrichtung der Zahnstange | Rahmengröße [mm] |
Ausführung | Stromversorgung | Transportlast [kg] |
Geschwindigkeit [mm/s] |
Hub [mm] |
Motor | Elektromagnetische Bremse |
|---|---|---|---|---|---|---|---|---|

|
60 | Hohe Geschwindigkeit | AC | 7 | 0–500 | 100–800 | AZM66 | Keine Bremse/Mit Bremse |
| 10 | 0–250 | |||||||
| DC | 5 | 0–200 | 100–500 | |||||
| 10 | 0–100 | |||||||
| Große Transportlast | AC | 30 | 0–90 | 100–800 | ||||
| DC | 0–50 | 100–500 | ||||||
| 80 | Hohe Geschwindigkeit | AC | 7 | 0–500 | 100–1000 | |||
| 20 | 0–250 | |||||||
| DC | 7 | 0–150 | ||||||
| 20 | 0–60 | |||||||
| Große Transportlast | AC | 70 | 0–40 | |||||
| 100 | 0–20 | |||||||
| DC | 50 | 0–20 | ||||||
| 100 | 0–10 |
Treiber
| Treiberversion | Stromversorgung [V] |
|
|---|---|---|
| Mit integriertem Controller | Einphasig 100–120 VAC Einphasig/dreiphasig 200–240 VAC 24/48 VDC |
|
| Mit Takteingang und RS-485-Schnittstelle | ||
| Mit Takteingang | ||
| Mit EtherCAT Schnittstelle | ||
| Mit EtherNet/IP Schnittstelle | ||
| Mit PROFINET Schnittstelle | ||
| Mit MECHATROLINK-III Schnittstelle | Einphasig 100–120 VAC Einphasig/dreiphasig 200–240 VAC |
|
| Mit SSCNET III/H Schnittstelle |
Anschlusskabel / Flexible Anschlusskabel
- Das Motorkabel kann nicht direkt mit dem Treiber verbunden werden. Finden Sie das richtige Anschlusskabel.
- Verwenden Sie flexible Anschlusskabel für Anwendungen, bei denen die Kabel gebogen werden.
| Länge [m] |
|
|---|---|
 |
0,5–20 |
Nutzen Sie den kostenlosen Antriebsauslegungs-Service. Nach Angabe der wichtigsten Parameter berechnet unsere technische Abteilung Ihnen das für die Anwendung passende Produkt.
Verwandte Produkte
Multi-Achs-Treiber der AZ-Serie für DC Stromversorgung
Alle AZ-Motoren für DC Stromversorgung und die mit diesen Motoren ausgestatteten elektrischen Aktuatoren können angeschlossen werden.

-

Für 2 Achsen -

Für 3 Achsen -

Für 4 Achsen
mini-Treiber der AZ-Serie für DC-Stromversorgung
mini-Treiber, kompakter und leichter als ein Standard-Treiber. Unterstützt den Batteriebetrieb und erweitert damit das Spektrum der möglichen Anwendungen.

Produkte eingrenzen
Download
Katalog

Bedienungsanleitung
Parametrier-Software

Produktübersicht und Zusatzinformationen
Technische Daten (Wärmeentwicklung bei Treibern)
Technische Daten (Einschaltstrom)