Electric Linear Slides EZSII Series for Clean Room Use
EZS6E065CM2-A


Actuator/Control Circuit
| Produktklassifikation | Produktname | Preis | Versand |
|---|---|---|---|
| Actuator / Control Circuit | EZS6E065CM2-A | - | Eingestelltes Produkt (Produktionsende 31.3.2019) |
Inklusive
- Actuator, Control Circuit, Hexagonal Socket Head Screw for Fixing the Linear Slide, Circuit Mounting Bracket, User I/O Connector, Sensor I/O Connector, Operating Manual
Spezifikationen
Weitere Spezifikationen
General Specifications (Motor)
Values are after rated operation at normal ambient temperature and humidity.
24 VDC
| Item | Specifications |
|---|---|
| Insulation Resistance |
100 MΩ or more when 500 VDC megger is applied between the following places.
|
| Dielectric Strength |
No abnormalities observed with application for 1 minute at the following points.
|
| Operating Ambient Temperature | 0~+40 °C (Non-freezing) |
| Operating Ambient Humidity | 85 % max. (Non-condensing) |
Note
- Do not measure insulation resistance or perform a dielectric strength test while the linear slide and controller are connected.
Single-phase 100-115 VAC, Single-phase 200-230 VAC
| Item | Specifications |
|---|---|
| Insulation Resistance |
100 MΩ or more when 500 VDC megger is applied between the following places.
|
| Dielectric Strength |
No abnormalities observed with application for 1 minute at the following points.
|
| Operating Ambient Temperature | 0~+40 °C (Non-freezing) |
| Operating Ambient Humidity | 85 % max. (Non-condensing) |
Note
- Do not measure insulation resistance or perform a dielectric strength test while the linear slide and controller are connected.
Circuit Specifications (Controller Mode)
Controller Mode
| Item | Controller Parts Name | ||||
|---|---|---|---|---|---|
| ESMC-K2 | ESMC-A2 | ESMC-C2 | |||
| Product Line | Stored data type | ||||
| Power Supply Input | Control Power Supply | 24 VDC±5 % 1.0 A [0.5 A only for controller (see +0.2 A with teaching pendant, +0.3 A with electromagnetic brake)]. | |||
| Main Power Supply | Voltage | 24 VDC±10 % | Single-phase 100-115 VAC −15~+10 % | Single-phase 200-230 VAC −15~+10 % | |
| Frequency | - | 50/60 Hz | |||
| Current | 4.0 A*1 | 6.0 A*1 | 3.5 A*1 | ||
| Positioning Data |
Setting Mode | Absolute mode (absolute-position specification), incremental mode (relative-position specification) | |||
| Setting Number | 63 points | ||||
| Setting Method | Setting by accessory teaching pendant (EZT1) or data setting software (EZED2) (Stored in EEPROM) | ||||
| Positioning*2 Control |
Method | Sequential positioning, Data-select positioning | |||
| Traveling Amount Setting Range | -83886.08~+83886.07 mm (in 0.01 mm units) | ||||
| Starting Speed Setting Range | 0.01~200.00 mm/s (in 0.01 mm/s units) | ||||
| Operating Speed Setting Range | 0.01~1500.00 mm/s (in 0.01 mm/s units) | ||||
| Acceleration/Deceleration Rate Setting Range | 0.01~20.00 m/s2 (in 0.01 m/s2 units) | ||||
| Control Mode |
|
||||
| Operation Mode | Positioning operation, Return-to-home operation, Linked operation (maximum 4 links), Continuous operation | ||||
| Input Signal/Input Mode | START, STOP, HOME/PRESET, FREE, M0~M5, REQ, ACL/CK: 24 VDC Photocoupler input Input resistance 4.7 kΩ FWD, RVS: 5 VDC Photocoupler input Input resistance 180 Ω or 24 VDC Photocoupler input Input resistance 2.7 kΩ +LS, −LS, HOMELS: 24 VDC Photocoupler input Input resistance 4.7 kΩ |
||||
| Output Signal/Output Mode | ALM, END/OUTR, MOVE, AREA/OUT0, OUT1: Photocoupler and Open-collector output (24 VDC 10 mA max.) ASG1, BSG1: Photocoupler and Open-collector output (24 VDC 15 mA max.) ASG2, BSG2: Line driver output*3 |
||||
| Protective Function | Excessive position deviation, overcurrent protection, overvoltage protection, overheat protection, overload, sensor error, overspeed, non-volatile memory error, etc. | ||||
| Indicator (LED) | PWR, ALM | PWR, ALM, CHARGE | |||
| Cooling Method | Natural Cooling Method | ||||
| Mass | 0.44 kg | 0.77 kg | |||
- *1
- The maximum current value varies depending on the linear slide and cylinder to be connected.
[ESMC-K2] ESRM3/ESRM4: 1.0 A ESRM5: 1.1 A EZSM3/EZSM4: 1.7 A EZSM6/SPVM6: 4.0 A EZAM4: 1.7 A EZAM6: 4.0 A
[ESMC-A2] EZSM3/EZSM4: 3.0 A EZSM6/SPVM6: 5.0 A SPVM8: 6.0 A EZAM4: 3.0 A EZAM6: 5.0 A PWAM6: 6.4 A PWAM8: 6.0 A
[ESMC-C2] EZSM3/EZSM4: 2.1 A EZSM6/SPVM6: 3.0 A SPVM8: 3.5 A EZAM4: 2.1 A EZAM6: 3.0 A PWAM6: 3.9 A PWAM8: 3.5 A - *2
- Since it varies depending on the linear slide and cylinder to be connected, check the specifications of each series.
- *3
- The pulse output has a time lag of up to maximum 1 ms with respect to the movement of the linear slide or cylinder. Use to check the linear slide and cylinder stop positions.
Circuit Specifications (Driver Mode)
Driver Mode
| Item | Controller Parts Name | ||||
|---|---|---|---|---|---|
| ESMC-K2 | ESMC-A2 | ESMC-C2 | |||
| Power Supply Input | Control Power Supply | 24 VDC±5 % 1.0 A [0.5 A for Controller only (see +0.2 A with teaching pendant, +0.3 A with electromagnetic brake)]. | |||
| Main Power Supply | Voltage | 24 VDC±10 % | Single-phase 100-115 VAC −15~+10 % | Single-phase 200-230 VAC −15~+10 % | |
| Frequency | − | 50/60 Hz | |||
| Current | 4.0 A*1 | 6.0 A*1 | 3.5 A*1 | ||
| Maximum Response Frequency | 1-Pulse Input Mode, 2-Pulse Input Mode: 80 kHz, Phase Difference Input Mode: 20 kHz | ||||
| Operation Mode | Return-to-home operation, Pulse input operation (1-pulse input mode, 2-pulse input mode, phase difference input mode) |
||||
| Input Signal/Input Mode | ACL/CK, FREE, C.OFF, HOME/PRESET, REQ, HMSTOP: 24 VDC Photocoupler input Input resistance 4.7 kΩ FP, RP: 5 VDC Photocoupler input Input resistance 180 Ω or 24 VDC Photocoupler input Input resistance 2.7 kΩ +LS, −LS, HOMELS: 24 VDC Photocoupler input Input resistance 4.7 kΩ |
||||
| Output Signal/Output Mode | MOVE, END/OUTR, ALM, TIM/OUT0, OUT1: Photocoupler, open-collector output (24 VDC, 10 mA max.) ASG1, BSG1: Photocoupler, open-collector output (24 VDC, 15 mA max.) ASG2, BSG2: Line driver output*2 | ||||
| Protective Function | Excessive position deviation, overcurrent protection, overvoltage protection, overheat protection, overload, sensor error, overspeed, non-volatile memory error, etc. | ||||
| Indicator (LED) | PWR, ALM | PWR, ALM, CHARGE | |||
| Cooling Method | Natural Cooling Method | ||||
| Mass | 0.44 kg | 0.77 kg | |||
- *1
- The maximum current value varies depending on the linear slide and cylinder to be connected.
[ESMC-K2] ESRM3/ESRM4: 1.0 A ESRM5: 1.1 A EZSM3/EZSM4: 1.7 A EZSM6/SPVM6: 4.0 A EZAM4: 1.7 A EZAM6: 4.0 A
[ESMC-A2] EZSM3/EZSM4: 3.0 A EZSM6/SPVM6: 5.0 A SPVM8: 6.0 A EZAM4: 3.0 A EZAM6: 5.0 A PWAM6: 6.4 A PWAM8: 6.0 A
[ESMC-C2] EZSM3/EZSM4: 2.1 A EZSM6/SPVM6: 3.0 A SPVM8: 3.5 A EZAM4: 2.1 A EZAM6: 3.0 A PWAM6: 3.9 A PWAM8: 3.5 A - *2
- The pulse output has a time lag of up to maximum 1 ms with respect to the movement of the linear slide or cylinder. Use to check the linear slide and cylinder stop positions.
Circuit General Specifications
Values are after rated operation at normal ambient temperature and humidity.
24 VDC
| Item | Specifications |
|---|---|
| Insulation Resistance |
100 MΩ or more when 500 VDC megger is applied between the following places.
|
| Dielectric Strength |
No abnormalities observed with application for 1 minute at the following points:
|
| Operating Ambient Temperature | 0~+40 °C (Non-freezing) |
| Operating Ambient Humidity | 85 % max. (Non-condensing) |
Note
- Do not measure insulation resistance or perform a dielectric strength test while the linear slide and controller are connected.
Single-Phase 100/115 VAC/Single-Phase 200/230 VAC
| Item | Specifications |
|---|---|
| Insulation Resistance |
100 MΩ or more when 500 VDC megger is applied between the following places.
|
| Dielectric Strength |
No abnormalities observed with application for 1 minute at the following points:
|
| Operating Ambient Temperature | 0~+40 °C (Non-freezing) |
| Operating Ambient Humidity | 85 % max. (Non-condensing) |
Calculating Load Moment
When a load is transported with an electric linear slide or electric cylinder (a unit equipped with shaft guide covers only), the load moment acts on the linear guide/shaft guide if the position of the load's center of gravity is offset from the center of the table/center of the shaft guide. The direction of action applies to the directions for pitching (MP), yawing (MY), and rolling (MR), depending on the position of the offset.
Even though the selected electric actuators satisfy the load mass and positioning time requirements, when the center of gravity of the load is overhung from the table's center/shaft guide’s center, the run life may decrease as a result of the load moment. Load moment calculations must be completed and whether the conditions are within specifications values must be checked. The moment applied under static conditions is the static permissible moment. The moment applied under movement is the dynamic permissible moment, and both must be checked.
Calculate the load moment of the electric linear slides and electric cylinders (units equipped with shaft guide covers only) based on loads that are applied. Check that the static permissible moment and dynamic permissible moment are within limits and check that strength is sufficient.
- *For more information on calculating static permissible moment and dynamic permissible moments, click here.
Load Moment Formula
When there are several overhung loads, etc., it is determined by the sum of moments from all loads.
For Multiple Loads (n)
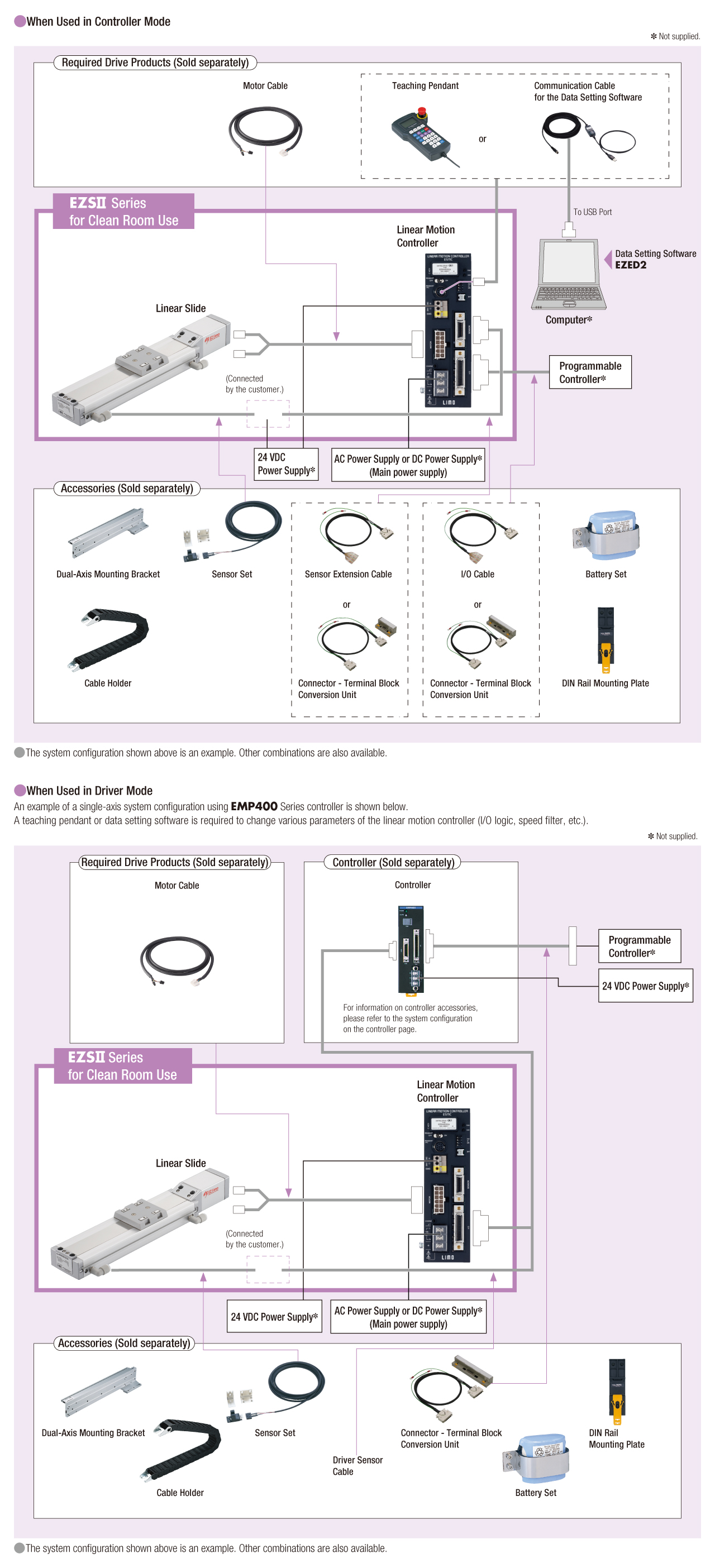
Systemkonfiguration