αSTEP Hybrid Stepper Servo

Un motor basado en motores paso a paso con un sistema de control singular e "híbrido" que combina las ventajas del "control en lazo abierto" y "lazo cerrado". Adecuado para aplicaciones con control de posición, velocidad y par.
Suggestions on Solving Problem With Stepper Motors and Servo Motors
αSTEP Hybrid Stepper Servo
Overview and Related Information
¿Qué es αSTEP?
¿Qué es αSTEP (Alpha step)?
La tecnología αSTEP se basa en motores paso a paso con un particular método de control que combina el control en lazo abierto con el control lazo cerrado.
Los motores paso a paso son capaces de un control preciso en lazo abierto del ángulo de rotación y la velocidad y se utilizan de forma habitual en ámbitos industriales como la fabricación de semiconductores y equipos de análisis médicos. αSTEP se desarrolló con el propósito de aumentar la fiabilidad de los motores paso a paso con control en lazo abierto. Al igual que en los servomotores, la tecnología αSTEP puede obtener un posicionamiento de gran precisión con control de velocidad, además de la capacidad de limitar el par generado por el motor con un valor deseado. Es idóneo para posicionamientos en distancias cortas debido a su elevado par en el rango de velocidad media y baja. Otra ventaja diferenciadora es su extensa gama de productos que incluye alimentaciones en CC y tamaños muy compactos.
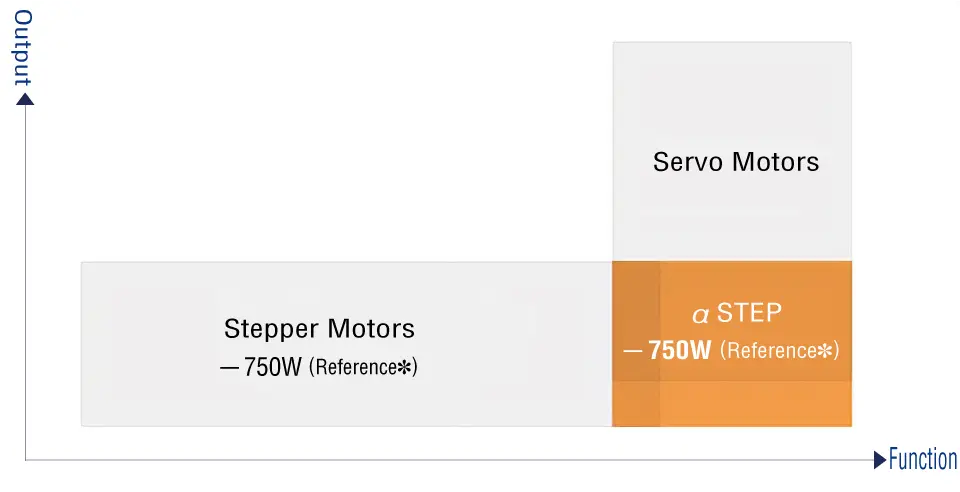
- *La potencia de salida (W) de un servomotor se define como la potencia de salida nominal a velocidad nominal. En motores paso a paso, con alta precisión de posicionamiento y una característica de par alto a velocidades medias y bajas, no es posible definir una potencia de salida nominal y no disponen de un valor de velocidad nominal. Dado que la potencia de salida (W) cambia según el cálculo con la velocidad de rotación, se muestra el par de un motor estándar como referencia para determinar la potencia del servomotor según su par nominal
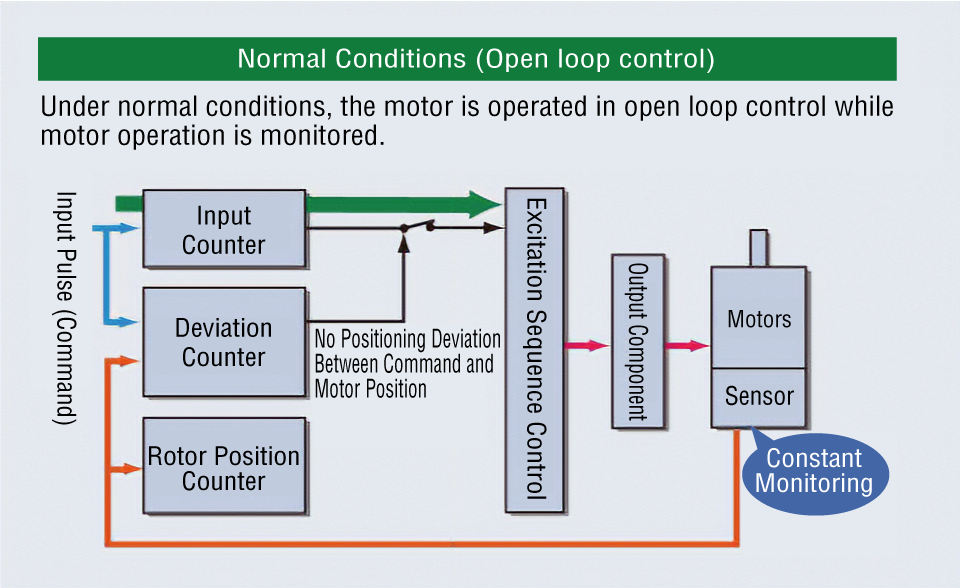
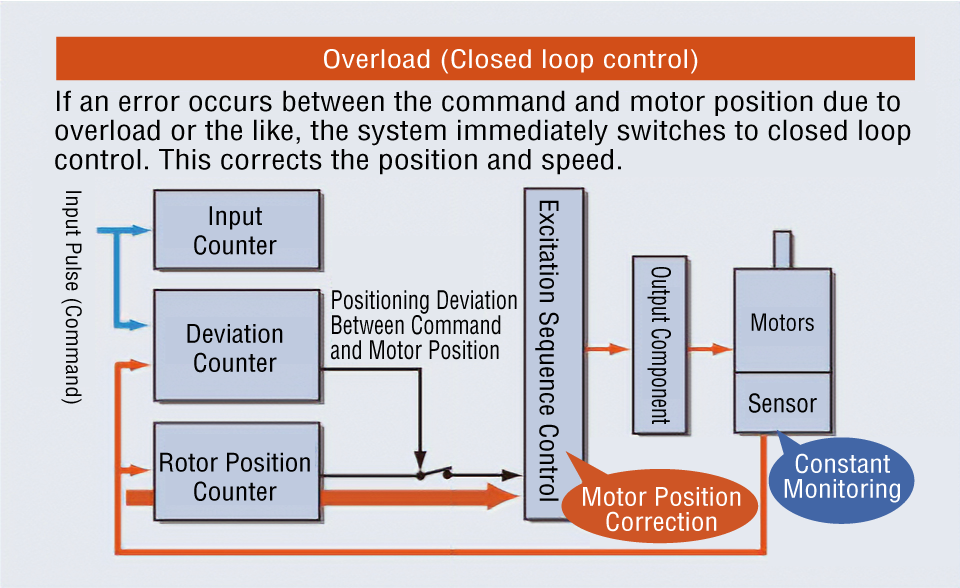
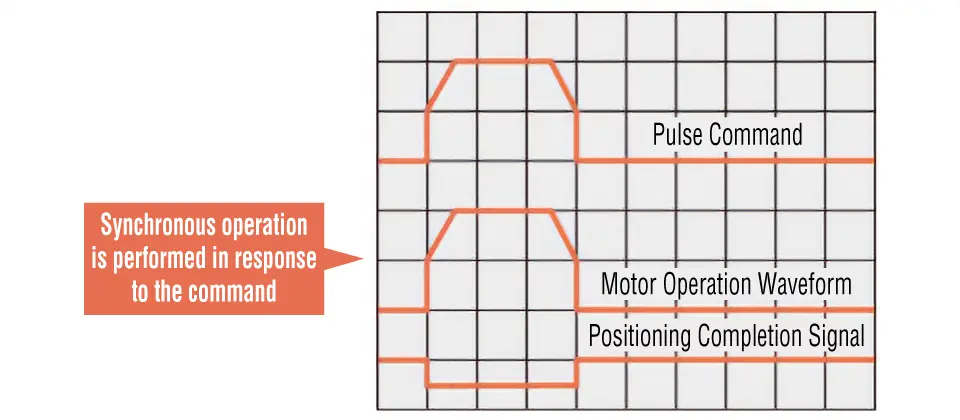
αSTEP cambia automáticamente entre control en lazo abierto y lazo cerrado en función la situación, monitorizando constantemente la posición y otros parámetros. Normalmente, al igual que en motores paso a paso convencionales, se obtiene en lazo abierto un movimiento sincronizado con la consigna. Si la desviación de posición supera ±1,8° debido a una sobrecarga, se pasa al control en lazo cerrado de compensación como en un servomotor.
Historia de αSTEP
La serie AS del primer αSTEP se lanzó en 1998. En 2007, se lanzó la serie AR para satisfacer las necesidades de ahorro energético y de baja generación de calor en los motores así como obtener una mayor compatibilidad con redes industriales. Fue reconocido como un producto de ahorro energético al recibir el 29º Premio del Ministerio de Economía, Comercio e Industria al Equipo de Ahorro de Energía de Excelencia del año 2008. Más tarde, en 2013, se lanzó la serie AZ con encoder absoluto multi-vuelta sin batería. Se permite ahora construir sistemas de posicionamiento absoluto sin batería. Así, en los últimos 20 años, αSTEP ha seguido evolucionando en respuesta a los nuevos tiempos. Hoy en día, nuestros productos son bien recibidos por muchos clientes y su uso se extiende a una amplia gama de aplicaciones, entre los que se incluye la automatización de fábricas (FA), semiconductores, equipos de fabricación de componentes electrónicos y equipos médicos.

Fortalezas de los αSTEP
Diseño
Alta respuesta
Permiten recorrer distancias cortas en un corto espacio de tiempo debido a la alta respuesta del motor paso a paso. Pueden ejecutar órdenes sin retrasos.
Funcionamiento continuo con cambios repentinos de carga y aceleraciones bruscas
La capacidad de respuesta del control en lazo abierto permite movimientos ágiles y sin retrasos con respecto a la consigna. El control en lazo cerrado se encarga de cambios repentinos en la carga. Se generará una señal de alarma en el improbable caso de producirse alguna anomalía.
Mantenimiento de la posición de parada sin fluctuaciones
Durante el posicionamiento, el motor se detiene con su propia fuerza de retención sin oscilaciones. Especialmente ventajoso en aplicaciones con mecanismos de baja rigidez donde se requiere una ausencia de vibraciones en parada.
Sin ajuste
El funcionamiento habitual con control en lazo abierto permite un posicionamiento sin ajuste de ganancias, incluso ante fluctuaciones de carga debidas a transmisiones por correa o cadena, levas, etc.
Ahorro de energía
Reducción de pérdidas del motor
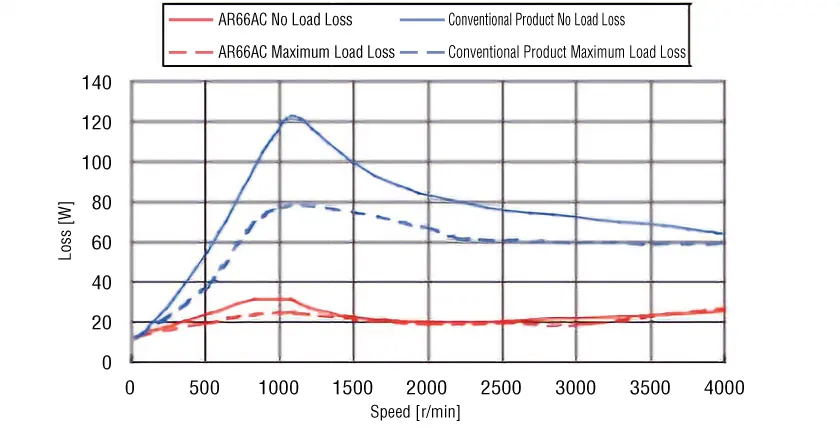
Revisamos los materiales del núcleo de hierro utilizados en el motor y optimizamos el circuito magnético y devanados del estátor. Entorno a las 1000 r/min, donde las pérdidas alcanzan su punto máximo, se consigue reducir la pérdida sin carga en aproximadamente 90 W, de 120 W a 30 W, en comparación con el producto convencional. Las pérdidas con carga máxima (factor de carga del 100 %) también se reducen de 80 W a 25 W, una reducción de aproximadamente 55 W.
Reducido consumo de energía del controlador
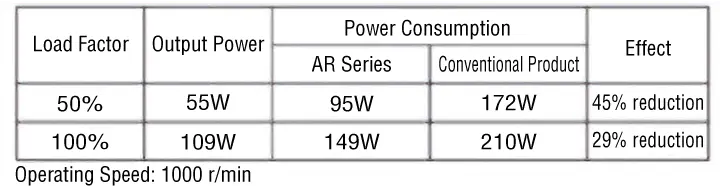
Se ha mejorado el control PWM del controlador para reducir las pérdidas de forma significativa. El consumo de energía conjunto de motor y controlador se reduce de forma considerable. La tabla a la derecha muestra una comparación del consumo de energía a 1000 r/min, indicando que con un factor de carga del 50 % se consigue un ahorro energético del 45 % respecto al modelo convencional.
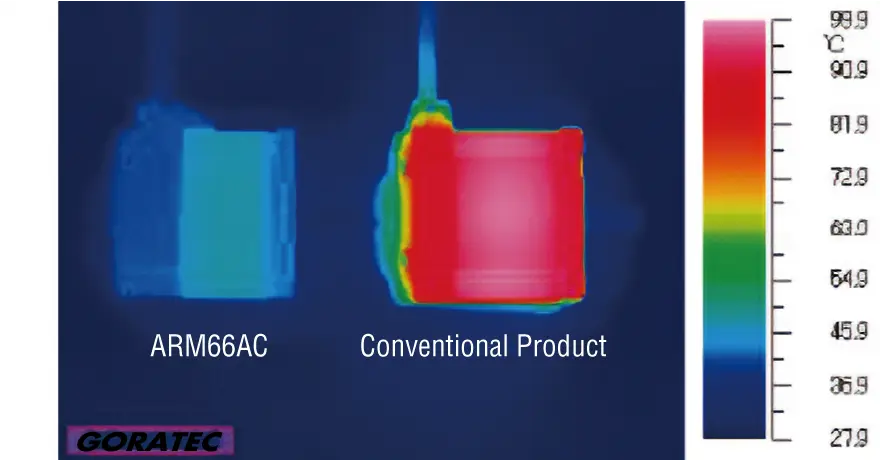
Menor generación de calor del motor
Al reducir el consumo de energía conseguimos al mismo tiempo reducir la generación de calor del motor. En el producto convencional, con una temperatura ambiente de 25 °C y una velocidad de rotación de 1600 r/min, la temperatura del recubrimiento exterior alcanza aproximadamente 100 °C en condiciones de trabajo de 2 segundos de funcionamiento y 3 segundos de parada, mientras que en el ARM66AC se alcanza una temeperatura de unos 50 °C en las mismas condiciones, esto supone una reducción del aumento de temperatura de 1/3.
Gama de productos
Además de los motores de tipo estándar, también disponemos de motorreductores y actuadores eléctricos que combinan los motores con sistemas mecánicos. Los controladores están disponibles con alimentación en CA (100 V-240 V) y en CC (24/ 48V). Existen también muchos productos compatibles con diversas redes industriales. La elección de diversos motores y controladores de la misma gama dentro del mismo equipo hace posible agrupar los componentes utilizados para el cableado, control y mantenimiento, reduciendo el tiempo y el esfuerzo necesarios en la puesta en marcha.

Disponibilidad
Cumplimiento de estándares globales
Productos disponibles con especificaciones de voltaje monofásicos de 100/200V, sistemas trifásicos de 200V y alimentación en CC, lo que permite su uso en los principales países de todo el mundo. Todas las gamas cuentan con certificación para las normas UL/CSA, cumplen con las normas EN y tienen el marcado CE.
Ventajas en la aplicación
αSTEP puede no solo controlar un posicionamiento de alta precisión y realizar control de velocidad, sino que también puede limitar el par generado por el motor a un valor determinado. Es idóneo para posicionamientos en distancias cortas debido a su elevado par en el rango de velocidad media y baja. Otra ventaja diferenciadora es su extensa gama de productos que incluye alimentaciones en CC y tamaños muy compactos. Estas características hacen que se utilice en una gran variedad de aplicaciones. A continuación se muestran algunos ejemplos reales de aplicación junto con las principales razones de adopción.
FA (Factory Automation)
Máquinas para automatización de procesos que requieren una gran variedad de movimientos como son transportar, empujar, tirar y agarrar elementos. Facilitamos el movimiento necesario gracias a las diversas comunicaciones disponibles y variedad de actuadores eléctricos.
Equipos de fabricación de semiconductores
Se utilizan desde hace muchos años en la fabricación de semiconductores por sus requerimientos de precisión a nivel micrométrico. Pueden eliminarse vibraciones no sólo durante el transporte sino también en parada.
Mesas de precisión

αSTEP se utiliza en mesas de precisión que requieren movimientos precisos a posiciones determinadas. Consigue un posicionamiento de precisión elevada en múltiples equipos, como analizadores y dispositivos de inspección.
Equipos médicos de dispensación y análisis

Nuestros productos aportan la confianza de uso durante décadas en la industria médica, donde se requiere un alto nivel de calidad y fiabilidad de características.
El control en lazo cerrado emite una alarma en caso de emergencia y notifica al usuario sobre posibles anomalías en la rotación del motor.
Máquinas de pesaje y envasado de alimentos

Nuestros productos se utilizan en máquinas de pesaje y envasado, equipos que requieren una velocidad elevada de procesamiento. Capacidad contrastada por su repetitividad de rápido posicionamiento en movimientos cortos, como en el pegado de etiquetas, contribuyendo a acortar los tiempos de producción del equipo.
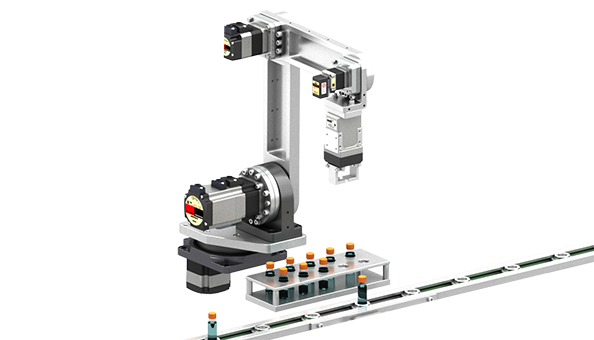
Robots de fabricación propia
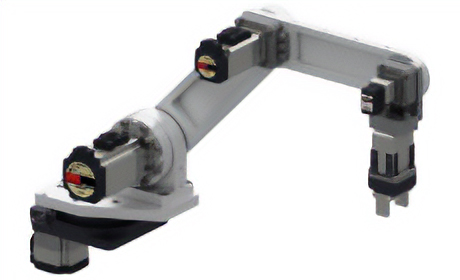
En los últimos años, el uso de nuestros productos para robots propios ha ido en aumento. Contribuyendo a la compacidad y al aligeramiento del peso, disponen además de monitorización de estados y de limitación de par necesarios en robots.
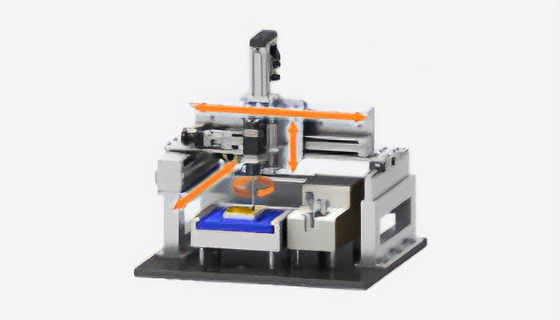
Ejemplos de equipos de fabricación propia
Los αSTEP se utilizan también en equipos de fabricación propia en nuestras plantas de fabricación. Además de la estructura y configuración del sistema del equipo, se explican los factores más importantes en la adopción del producto en cada eje.
Disponemos de una sección con toda la información de nuestro soporte desde el diseño hasta la puesta en marcha.
Respondiendo a las necesidades de la robótica
En el contexto de escasez de mano de obra, se ha experimentado un aumento a la demanda de robots que puedan reemplazar ciertos trabajos. Hay también cada vez más situaciones en las que las empresas se plantean la posibilidad de construir robots propios, más pequeños y capaces de realizar trabajos en la línea de producción. La serie AZ αSTEP viene equipada con un sistema absoluto que elimina la necesidad de batería, así como un motor de control compacto que satisface las necesidades de miniaturización en la producción propia de robots.
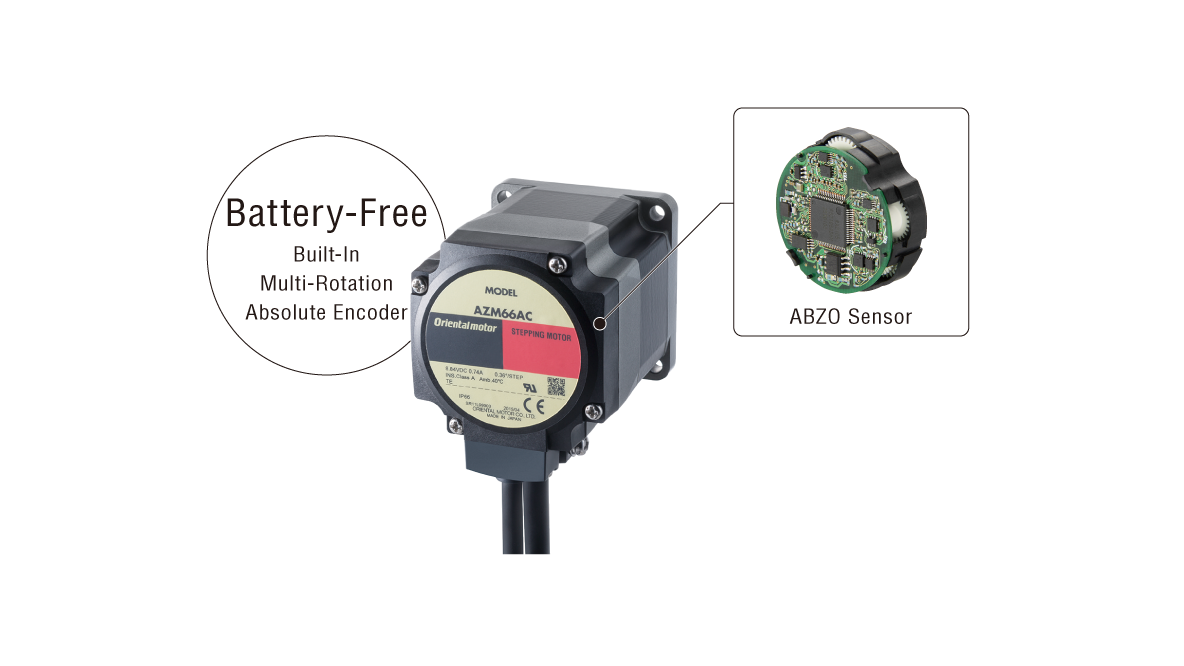
El encoder mecánico absoluto multi-vuelta reduce el número de sensores y elimina el uso de baterías
Con la serie AZ αSTEP pueden reducirse los sensores externos como el de referenciado, contribuyendo a una configuración compacta con menor cableado. El encoder mecánico absoluto multi-vuelta [ABZO] retiene la información de posición incluso en casos de interrupción de potencia durante el posicionamiento, debido a una parada de emergencia o un corte en la alimentación. Al ser de tipo mecánico, no necesita batería para retener la información. Ya no es necesario preocuparse por el coste de las baterías, problemas que puedan surgir durante el funcionamiento o en los tiempos de mantenimiento. Además, los propios motores de la serie AZ pueden sustituir a los sensores y convertir el estado del robot en valores numéricos.

Monitorización del estado del robot para un óptimo control
Sin demasiado par
Puede restringirse el par de salida para evitar daños en el mecanismo y el motor. Se emite una señal TLC cuando se alcanza el valor límite configurado para la detección y uso por parte del PLC.
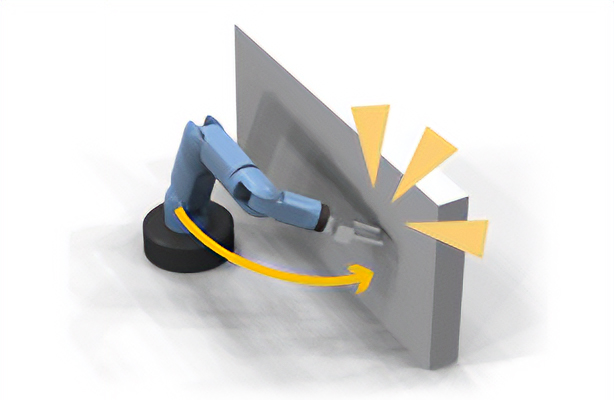
Detección de anomalías y parada en caso de alarma.
Utilizando información sobre el par y la posición, es posible detectar y predecir irregularidades antes de llegar al estado de alarma. El sistema también permite configurar señales de salida hacia el control principal para proceder a paradas inmediatas.
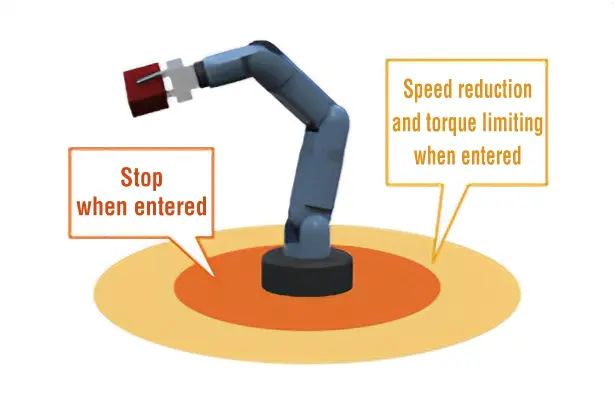
Restricciones de velocidad y par para cada área de funcionamiento
Pueden introducirse señales en base a la información de fuentes externas, como sensores de área, de manera que cambie el modo de funcionamiento con otros niveles de par y velocidad preestablecidos.
Capaz de monitorizar y recopilar informaciones sobre el estado del motor
Algunos estados de información pueden emitir una señal en cuanto se alcanza un valor umbral preestablecido. De utilidad en el mantenimiento preventivo y mejora en la seguridad del equipo.
Monitorización de la temperatura del motor
Es posible monitorizar en tiempo real la temperatura del motor del robot.

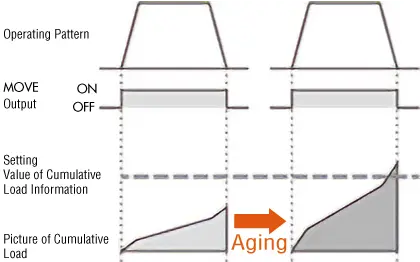
Monitor de carga acumulada
Puede determinarse el factor de carga del motor por área y detectarse como un valor. Útil cuando se quieren evaluar los cambios en la carga a largo plazo, como el deterioro a lo largo del tiempo.
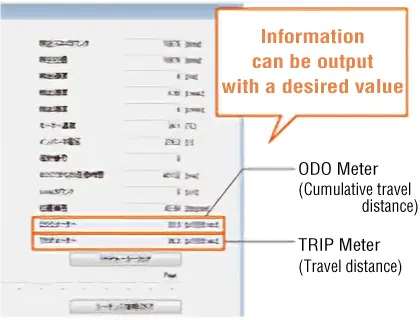
Monitorización de ODO/TRIP
Permite monitorizar el número total de rotaciones del motor. Útil para tareas de mantenimiento, etc.
Gamas de motores compactos y ligeros para la reducción de peso en los extremos del robot.
Disponemos de una amplia gama de motores y actuadores compactos y ligeros. Contribuyen a una reducción del tamaño del robot y a reducir el peso en cada eje del brazo y el efector final.
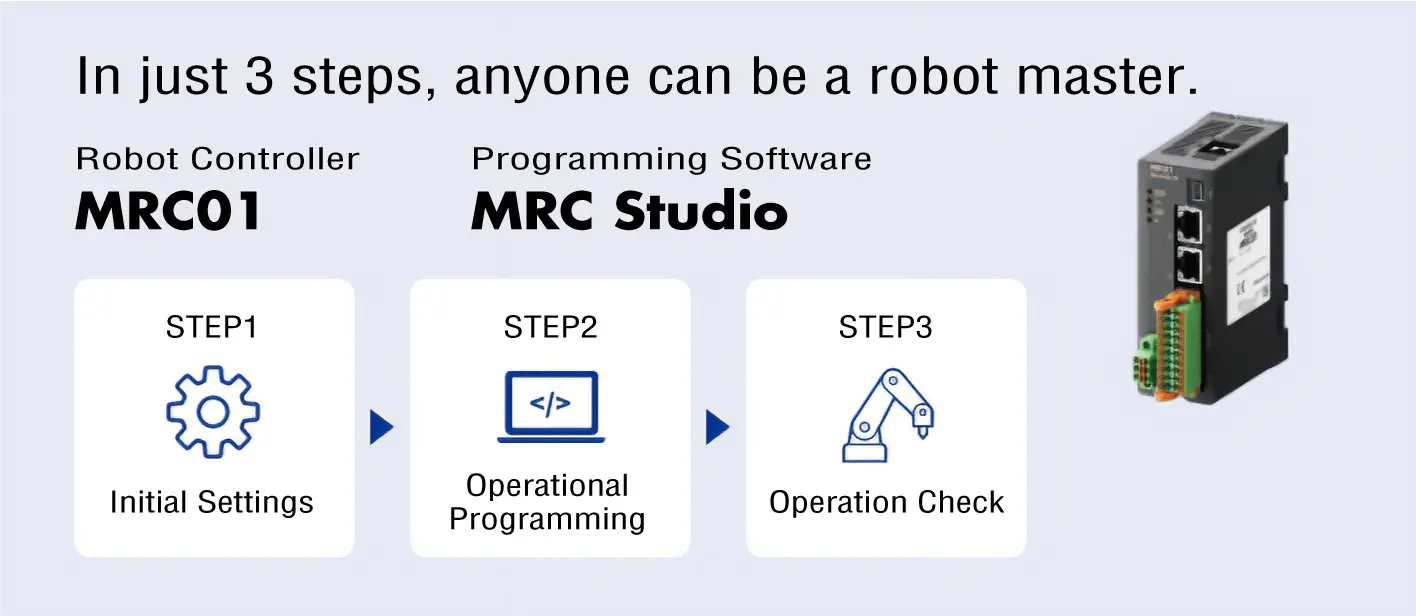
Productos relacionados
También ofrecemos un controlador de robot que le permite configurar, programar y ejecutar de forma sencilla el robot que haya creado con la serie AZ αSTEP.
Gama de productos
Gama de productos αSTEP
Serie AZ αSTEP
-
Encoder mecánico absoluto multi-vuelta
La detección de posición absoluta es posible en un rango de ±900 revoluciones (1800 revoluciones)* del eje del motor desde la posición de inicio de referencia.- *±450 revoluciones (900 revoluciones) para productos de tamaño de brida de 20 mm, 28 mm (30 mm).
- Sin batería
La información de posicionamiento se gestiona de forma mecánica mediante el sensor ABZO, y puede conservarse incluso si se interrumpe la alimentación o si se desconecta el cable entre el motor y el controlador.
Gama de productos
| Serie | Serie AZ | |
|---|---|---|
| Características |

|
|
| Sensor de posición |
ABZO (encoder absoluto multi-vuelta sin batería) 
|
|
| Resolución del motor | 3,6˚~0,036˚ | |
| Método de rreferenciado | Tope mecánico | ○ |
| Sensor externo | ○ | |
| Sistema absoluto | No requiere batería | |
| Funcionamiento continuo | △ (Hasta una temperatura máxima de 85 °C del sensor del motor) |
|
| Tipo de motor |
Tipo estándar |
|
| Tipo de actuador |
Actuadores lineales eléctricos |
|
| Tipo de controlador |
Entrada de pulsos |
|
| Tipo de comunicación |
EtherNet/IP™ |
|
| Función de secuencia | ○ | |
| Función de corte de potencia | ○ | |
| Función de recopilación de datos | ○ | |
Tipos de motor/actuador
Gama de productos de motor/motorreductor
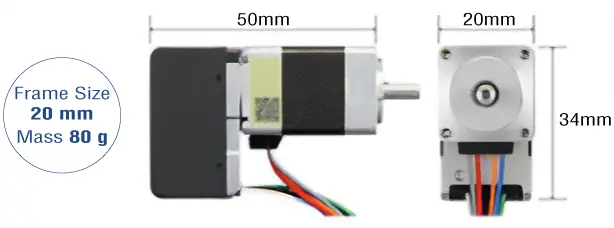
Disponible una amplia gama de motores, desde el motor más pequeño de la industria con un tamaño de brida de 20 mm hasta varios tipos de motorreductores. Variedad de opciones para una solución óptima entre los distintos tipos de motorreductor según el par, la precisión (juego) y el precio.
Tipo estándar
Tamaño de brida 20 mm ~ 85 mm

Reductor TS/TH(engranajes rectos)
Tamaño de brida 42 mm ~ 90 mm
Reductor FC ortogonal
(engranajes ortogonales)
Tamaño de brida 42 mm ~ 60 mm

Tipo reductor PS
(engranajes planetarios)
Tamaño de brida 28 mm ~ 90 mm
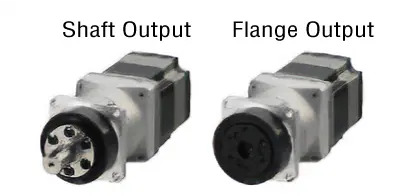
Tipo reductor HPG![]() (Harmonic Planetary®)
(Harmonic Planetary®)
Tamaño de brida 40 mm ~ 90 mm

Tipo reductor armónico![]() (Harmonic Drive®)
(Harmonic Drive®)
Tamaño de brida 30 mm ~ 90 mm
Gama de actuadores eléctricos equipados con αSTEP
Oriental Motor dispone de una amplia gama de actuadores eléctricos, que combinan motor y mecanismo para satisfacer diversas las necesidades de automatización de equipos Con motores y actuadores de igual funcionalidad. Gracias a la integración de motores de la serie AZ, no es necesario el uso de sensores externos, reduciendo la carga de trabajo de electricistas y personal de mantenimiento.

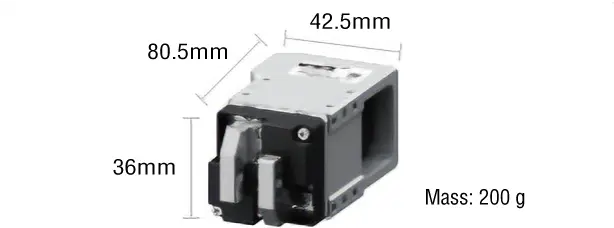
Actuadores lineales eléctricos

Cilindros eléctricos
Cilindros eléctricos compactos

Actuadores rotatorios huecos

Pinzas eléctricas

Sistema piñón-cremallera
Tipos de controlador
Controladores compatibles con comunicaciones
Productos compatibles con EtherNet/IP, PROFINET y EtherCAT respectivamente.
Ahorro de cableado gracias a un único cable de comunicación para la conexión entre el controlador del motor y el controlador principal.

- Controladores compatibles con EtherNet/IP
- Controladores compatibles con PROFINET
- Controladores compatibles con EtherCAT
- Controladores multieje compatibles con EtherCAT
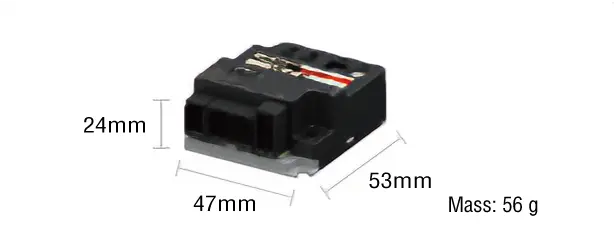
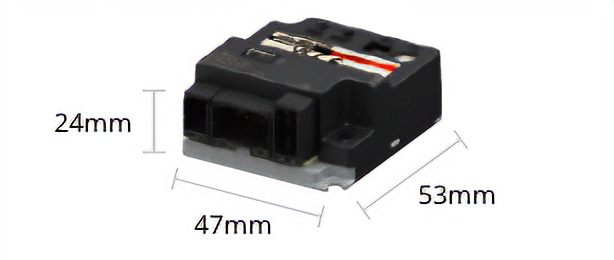
Mini controlador serie AZ αSTEP
Este controlador compacto puede controlarse a través de la comunicación RS-485. La eliminación de selectores y del conector de E/S ha dado como resultado un controlador más pequeño y ligero. Diseño compacto para su instalación en espacios reducidos. Con un peso de tan solo 56 g, su diseño ligero reduce el par de carga y la inercia incluso cuando se instala en piezas móviles, lo que contribuye a una mayor flexibilidad en el diseño de armarios de control y mecánicos.
Driver tipo controlador integrado
Con este tipo, los perfiles de movimiento se configuran en el controlador y luego se seleccionan y ejecutan desde el control principal o PLC. La conexión y el control con el sistema principal se puede realizar de las siguientes maneras: E/S, comunicación RS485/Modbus (RTU) o redes industriales. Mediante pasarela (a la venta por separado), disponible con comunicaciones CC-Link, MECHATROLINK y EtherCAT.
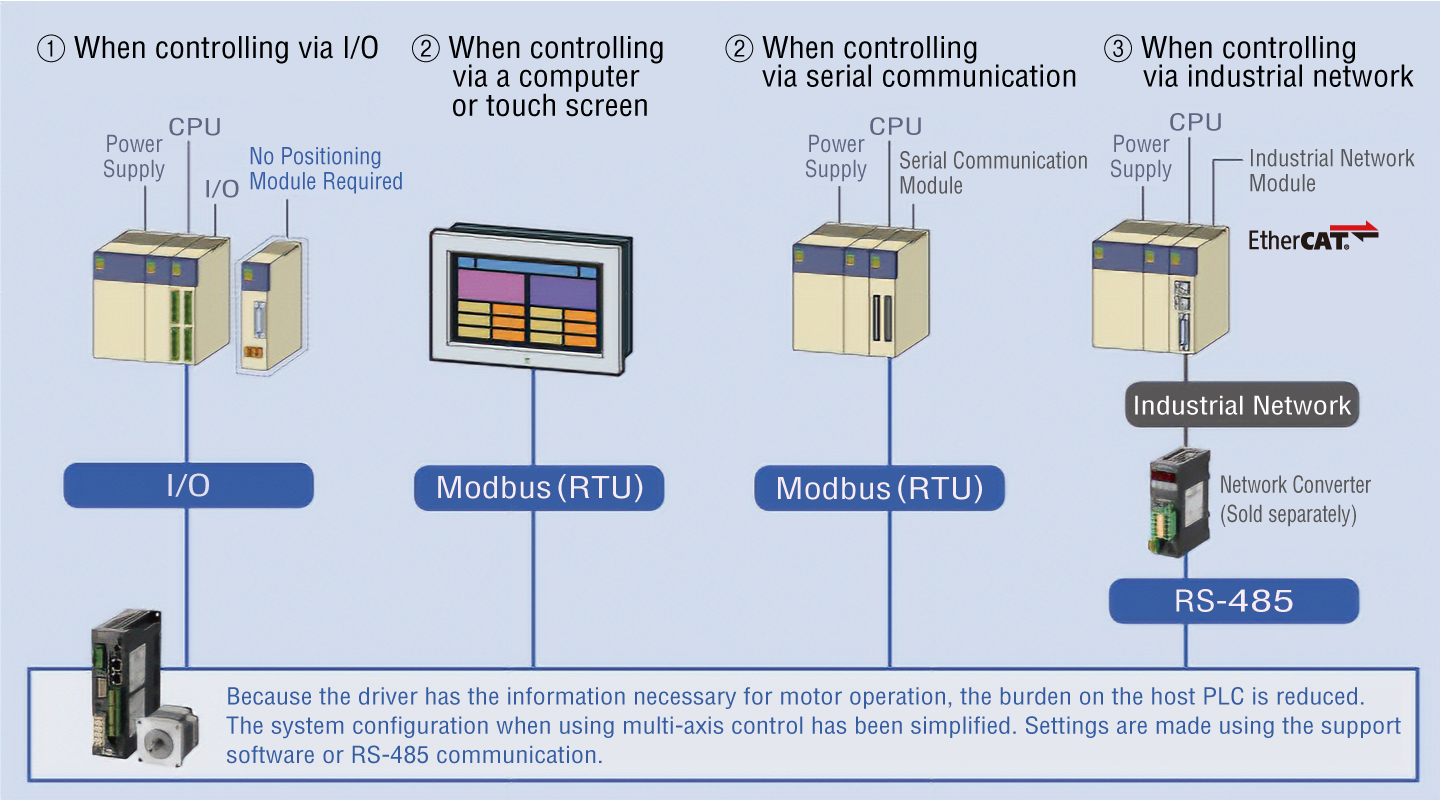
Controlador tipo entrada de pulsos
La operación se realiza mediante la entrada de pulsos hacia el controlador. El control del motor se realiza desde un módulo de posicionamiento (generador de pulsos) facilitado por el cliente.
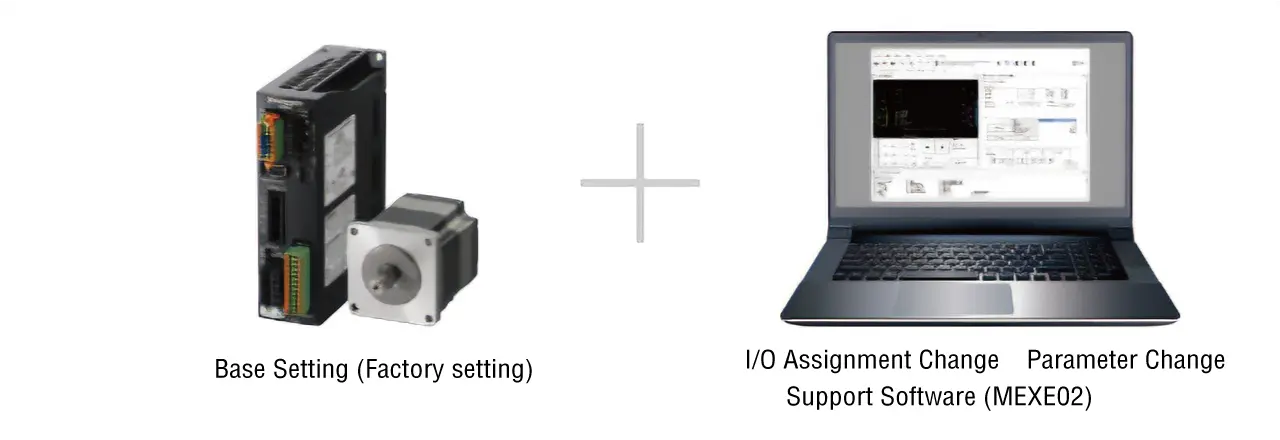
También puede utilizarse el software de soporte (MEXE02) para comprobar el historial de alarmas y monitorizar la información de estados.
For Those Who Have Not Decided on a Series
View More About the Selection Guide
Selection Guide
This selection guide will help you find the product series best suited for your equipment. Select an equipment application example and follow the guidance to select a product series.
Learn More
View More about the Problem Solving Case Studies
Problem Solving Case Studies
Here is the information on the solutions for your equipment issues. We introduce examples of in-house production of equipment used in actual manufacturing sites, as well as application examples of our recommended products to solve the issues with conventional equipment.
Learn More